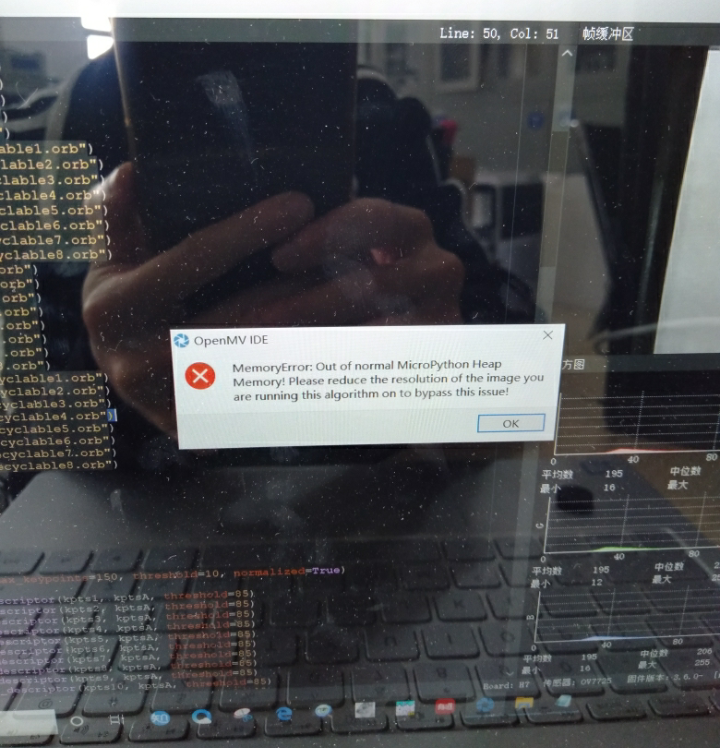
从SD卡里导入文件进行特征点检测,提示运行内存不足,除了降低图片分辨率外,还有其他技巧可以解决这个问题吗?
import sensor, time, image
from pid import PID
from pyb import Servo
pan_servo=Servo(1)
tilt_servo=Servo(2)
pan_pid = PID(p=0.10, i=0, imax=90)
tilt_pid = PID(p=0.10, i=0, imax=90)
sensor.reset()
sensor.set_contrast(3)
sensor.set_gainceiling(16)
sensor.set_framesize(sensor.VGA)
sensor.set_windowing((320, 240))
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False, value=100)
def draw_keypoints(img, kpts):
if kpts:
print(kpts)
img.draw_keypoints(kpts)
img = sensor.snapshot()
time.sleep(1000)
kpts1 = image.load_descriptor("/A1.orb")
kpts2 = image.load_descriptor("/A2.orb")
kpts3 = image.load_descriptor("/A3.orb")
kpts4 = image.load_descriptor("/A4.orb")
kpts5 = image.load_descriptor("/A5.orb")
kpts6 = image.load_descriptor("/A6.orb")
kpts7 = image.load_descriptor("/A7.orb")
kpts8 = image.load_descriptor("/A8.orb")
kpts9 = image.load_descriptor("/B1.orb")
kpts10 = image.load_descriptor("/B2.orb")
kpts11 = image.load_descriptor("/B3.orb")
kpts12 = image.load_descriptor("/B4.orb")
kpts13 = image.load_descriptor("/B5.orb")
kpts14 = image.load_descriptor("/B6.orb")
kpts15 = image.load_descriptor("/B7.orb")
kpts16 = image.load_descriptor("/B8.orb")
kpts17 = image.load_descriptor("/C1.orb")
kpts18 = image.load_descriptor("/C2.orb")
kpts19 = image.load_descriptor("/C3.orb")
kpts20 = image.load_descriptor("/C4.orb")
kpts21 = image.load_descriptor("/C5.orb")
kpts22 = image.load_descriptor("/C6.orb")
kpts23 = image.load_descriptor("/C7.orb")
kpts24 = image.load_descriptor("/C8.orb")
kpts25 = image.load_descriptor("/D1.orb")
kpts26 = image.load_descriptor("/D2.orb")
kpts27 = image.load_descriptor("/D3.orb")
kpts28 = image.load_descriptor("/D4.orb")
kpts29 = image.load_descriptor("/D5.orb")
kpts30 = image.load_descriptor("/D6.orb")
kpts31 = image.load_descriptor("/D7.orb")
kpts32 = image.load_descriptor("/D8.orb")
img = sensor.snapshot()
clock = time.clock()
while (True):
clock.tick()
img = sensor.snapshot()
pan_servo.angle(0)
time.sleep(200)
tilt_servo.angle(-17)
time.sleep(200)
kptsA = img.find_keypoints(max_keypoints=150, threshold=10, normalized=True)
if (kptsA):
match1 = image.match_descriptor(kpts1, kptsA, threshold=85)
match2 = image.match_descriptor(kpts2, kptsA, threshold=85)
match3 = image.match_descriptor(kpts3, kptsA, threshold=85)
match4 = image.match_descriptor(kpts4, kptsA, threshold=85)
match5 = image.match_descriptor(kpts5, kptsA, threshold=85)
match6 = image.match_descriptor(kpts6, kptsA, threshold=85)
match7 = image.match_descriptor(kpts7, kptsA, threshold=85)
match8 = image.match_descriptor(kpts8, kptsA, threshold=85)
match9 = image.match_descriptor(kpts9, kptsA, threshold=85)
match10 = image.match_descriptor(kpts10, kptsA, threshold=85)
match11 = image.match_descriptor(kpts11, kptsA, threshold=85)
match12 = image.match_descriptor(kpts12, kptsA, threshold=85)
match13 = image.match_descriptor(kpts13, kptsA, threshold=85)
match14 = image.match_descriptor(kpts14, kptsA, threshold=85)
match15 = image.match_descriptor(kpts15, kptsA, threshold=85)
match16 = image.match_descriptor(kpts16, kptsA, threshold=85)
match17 = image.match_descriptor(kpts17, kptsA, threshold=85)
match18 = image.match_descriptor(kpts18, kptsA, threshold=85)
match19 = image.match_descriptor(kpts19, kptsA, threshold=85)
match20 = image.match_descriptor(kpts20, kptsA, threshold=85)
match21 = image.match_descriptor(kpts21, kptsA, threshold=85)
match22 = image.match_descriptor(kpts22, kptsA, threshold=85)
match23 = image.match_descriptor(kpts23, kptsA, threshold=85)
match24 = image.match_descriptor(kpts24, kptsA, threshold=85)
match25 = image.match_descriptor(kpts25, kptsA, threshold=85)
match26 = image.match_descriptor(kpts26, kptsA, threshold=85)
match27 = image.match_descriptor(kpts27, kptsA, threshold=85)
match28 = image.match_descriptor(kpts28, kptsA, threshold=85)
match29 = image.match_descriptor(kpts29, kptsA, threshold=85)
match30 = image.match_descriptor(kpts30, kptsA, threshold=85)
match31 = image.match_descriptor(kpts31, kptsA, threshold=85)
match32 = image.match_descriptor(kpts32, kptsA, threshold=85)
if (match1.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match2.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match3.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match4.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match5.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match6.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match7.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match8.count()>10):
pan_servo.angle(40)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match9.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match10.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match11.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match12.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match13.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match14.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match15.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match16.count()>10):
tilt_servo.angle(-47)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match17.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match18.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match19.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match20.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match21.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match22.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match23.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match24.count()>10):
pan_servo.angle(-35)
time.sleep(400)
pan_servo.angle(0)
time.sleep(400)
elif (match25.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match26.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match27.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match28.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match29.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match30.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match31.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
elif (match32.count()>10):
tilt_servo.angle(13)
time.sleep(400)
tilt_servo.angle(-17)
time.sleep(400)
else :
pan_servo.angle(0)
time.sleep(200)
tilt_servo.angle(-17)
time.sleep(200)
print(kptsA, "matched:%d dt:%d"%(match4.count(), match4.theta()))
img.draw_string(0, 0, "FPS:%.2f"%(clock.fps()))