import pyb
from pyb import Pin
RED_LED_PIN = 1
c=9
d=9
p_in1 = Pin('P7', Pin.IN, Pin.PULL_UP)
p_in2 = Pin('P8', Pin.IN, Pin.PULL_UP)
p_in3 = Pin('P9', Pin.IN, Pin.PULL_UP)
while(1):
a=p_in1.value()
b=p_in2.value()
f=p_in3.value()
if(a == 0):
import sensor, time, image, pyb
from pyb import UART
uart = UART(3, 115200)
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.B128X128)
sensor.set_windowing((92,112))
sensor.skip_frames(10)
sensor.skip_frames(time = 3000)
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(10)
sensor.skip_frames(time = 100)
pyb.LED(RED_LED_PIN).off()
NUM_SUBJECTS = c
NUM_SUBJECTS_IMGS = 20
img = sensor.snapshot()
d0 = img.find_lbp((0, 0, img.width(), img.height()))
img = None
pmin = 999999
num=0
def min(pmin, a, s):
global num
if a<pmin:
pmin=a
num=s
return pmin
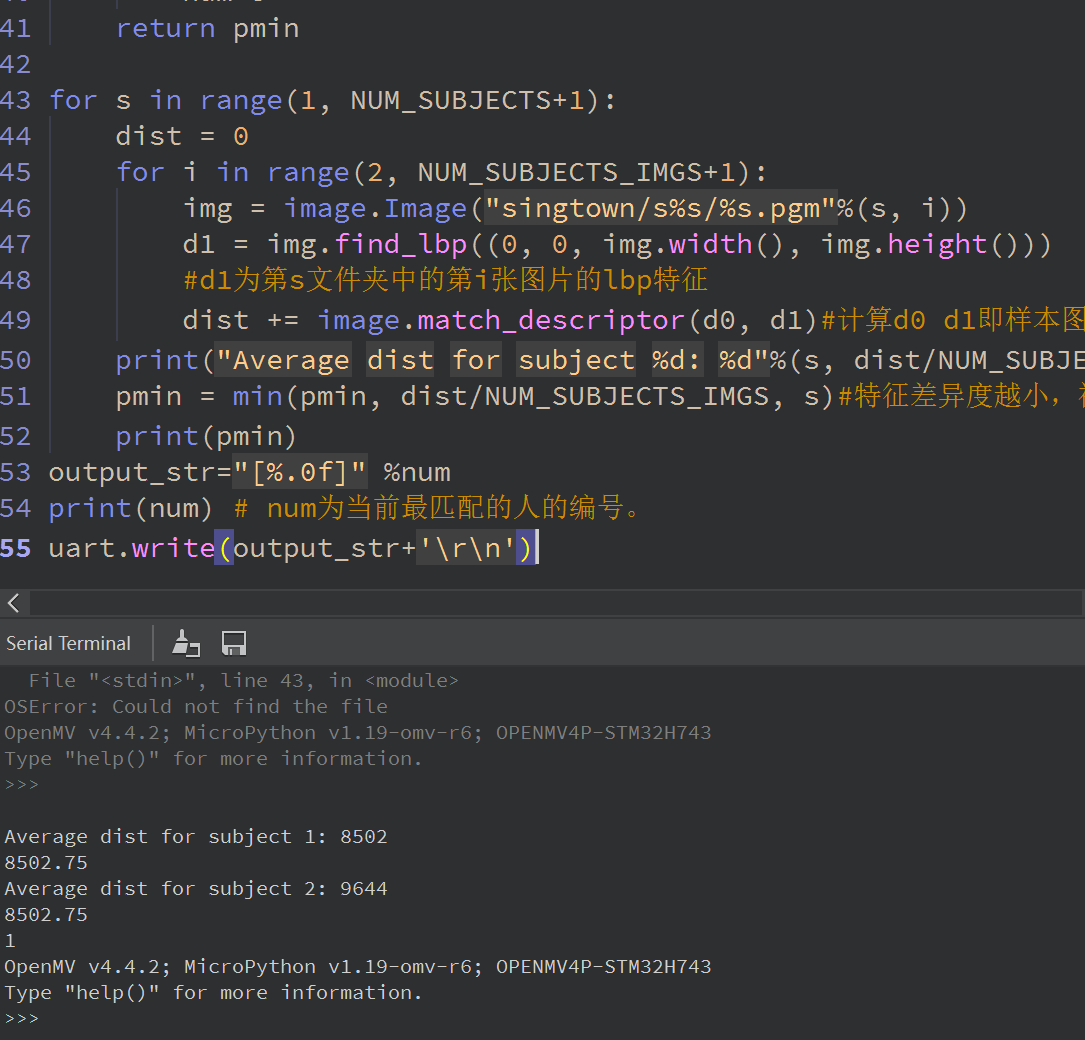
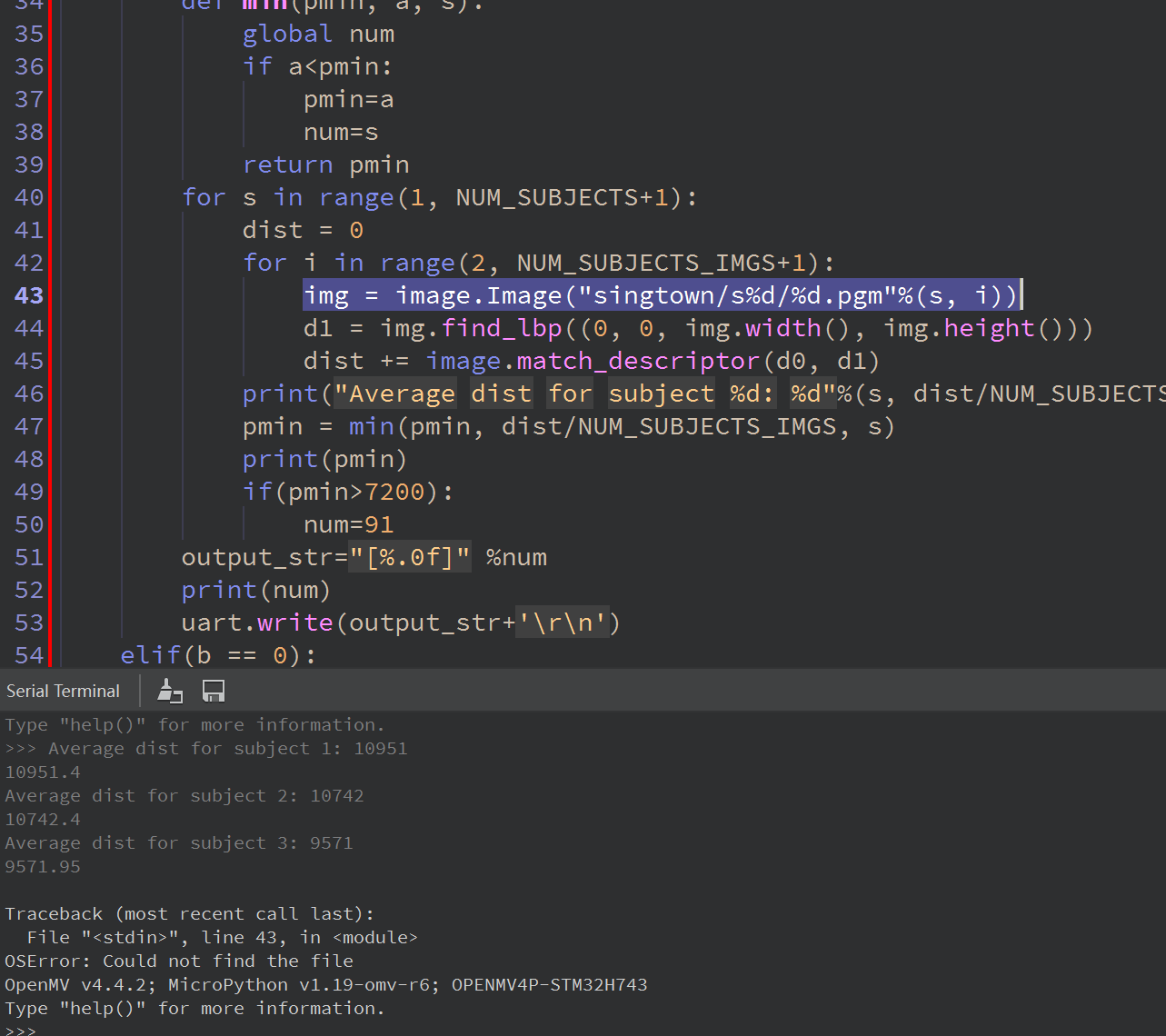
for s in range(1, NUM_SUBJECTS+1):
dist = 0
for i in range(2, NUM_SUBJECTS_IMGS+1):
img = image.Image("singtown/s%d/%d.pgm"%(s, i))
d1 = img.find_lbp((0, 0, img.width(), img.height()))
dist += image.match_descriptor(d0, d1)
print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS))
pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)
print(pmin)
if(pmin>7200):
num=91
output_str="[%.0f]" %num
print(num)
uart.write(output_str+'\r\n')
elif(b == 0):
import sensor, image, pyb
c=c-1
d=d-1
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.B128X128)
sensor.set_windowing((92,112))
sensor.skip_frames(10)
sensor.skip_frames(time = 200)
num = d
n = 60
while(n):
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(time = 200)
pyb.LED(RED_LED_PIN).off()
pyb.LED(BLUE_LED_PIN).on()
print(c)
print(d)
print(n)
sensor.snapshot().save("singtown/s%s/%s.pgm" % (num, n) )
n -= 1
pyb.LED(BLUE_LED_PIN).off()
print("Done! Reset the camera to see the saved image.")
if(f == 0):
import sensor, image, time
import math
from pyb import UART
uart = UART(3, 115200)
red_threshold = (0, 100, -128, 5, -128, -22)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()
K=2880
i=0
g=1
while(g):
i=i+1
clock.tick()
img2 = sensor.snapshot()
blobs = img2.find_blobs([red_threshold])
if len(blobs) == 0:
length=92
output_str="[%.0f]" % (length)
print("angle:%.0f")
print("distance:%.0f"%length)
uart.write(output_str+'\r\n')
elif len(blobs) == 1:
b = blobs[0]
img2.draw_rectangle(b[0:4])
img2.draw_cross(b[5], b[6])
Lm = (b[2]+b[3])/2
length = K/Lm
for blob in blobs:
t=(blob.cx()-80)
a=math.atan(t/66/1.732)*180/3.1415926
b = blobs[0]
Lm = (b[2]+b[3])/2
length = 93
output_str="[%.0f,%.0f]" % (length,a)
print("angle:%.0f"%a)
print("distance:%.0f"%length)
uart.write(output_str+'\r\n')
g=0