ee
ixuxzzyz
远距离就是我在家,而我的openmv在其他地方,有没有相关的例子,没有的话能不能提供一下相关解决的思路和方法
@kidswong999
那么请问一下,最下面的print函数那里不是帮那个RGB值打印出来吗?那么它怎么变成LAB了呢,或者我怎么帮这个lab的值通过什么函数把它转换成rgb呢?
import sensor, image, time, json
from pyb import UART
from pyb import DAC
sensor.reset() # 初始化摄像头
sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565.
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(10) # 跳过10帧,使新设置生效
sensor.set_auto_whitebal(False) # Create a clock object to track the FPS.
sensor.set_auto_gain(False) #关闭自动增益
ROI=(100,40,160,160) #图像中框的对应x,y,长,宽,
dac = DAC("P6") # Must always be "P6".
while(True):
img = sensor.snapshot() # Take a picture and return the image.
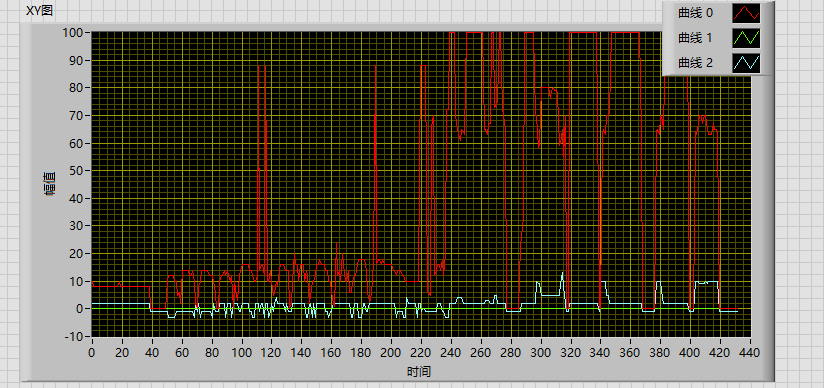
statistics=img.get_statistics(roi=ROI)
color_l=statistics.l_mode()
color_a=statistics.a_mode()
color_b=statistics.b_mode()
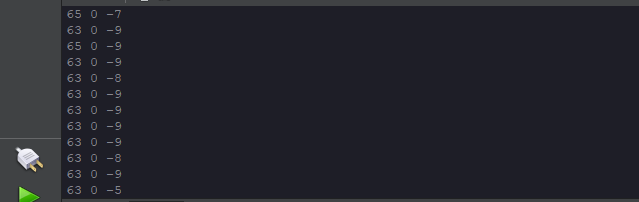
print(color_l,color_a,color_b) #将ROI中的对应RGB值显示出来
img.draw_rectangle(ROI)
@kidswong999 不用了,麻烦您了,我已经解决这个问题了,那个格式就是utf8
@kidswong999 我就是像通过上位机labview来发送数据到openmv,不通过那个串口,但是我们不知道下位机接收的那个数据类型是什么,我们用字符串发送,openmv没有动静,所以像请教您一下,串口那里好像是utf8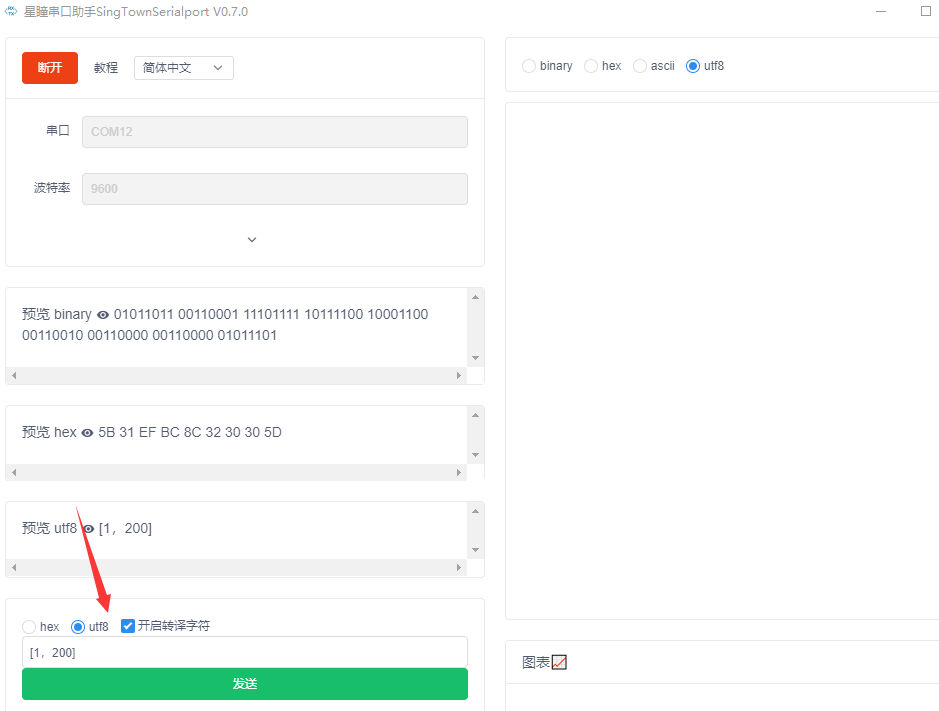
import time
import pyb
import json
from pyb import Pin
from pyb import UART
from pyb import DAC
dac = DAC("P6") # Must always be "P6".
uart = UART(3,9600,timeout_char = 1000)
while(True):
if uart.any():
time.sleep(0.05)
i =uart.readline().decode()
a, b = json.loads(i)
p = pyb.Pin("P0", pyb.Pin.OUT_PP)
p.value(a)
dac.write(int(b))#输入格式为[1.2]