O
otpm
@otpm
0
声望
5
楼层
493
资料浏览
0
粉丝
0
关注
otpm 发布的帖子
-
180°翻转摄像头后,热成像图像没有翻转发布在 OpenMV Cam
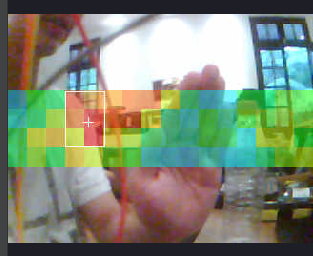
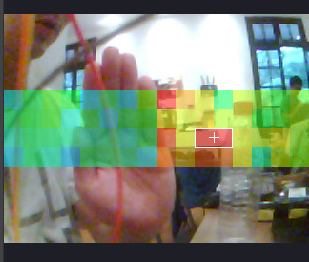
如图,热成像区域和实际显示的手部区域是镜像是反的
我想把热成像区域翻转一下# MLX90621 Overlay Demo # # This example shows off how to overlay a heatmap onto your OpenMV Cam's # live video output from the main camera. import sensor, image, time, fir ALT_OVERLAY = False # Set to True to allocate a second ir image. sensor.reset() sensor.set_hmirror(True) sensor.set_vflip(True) sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) # Initialize the thermal sensor fir.init(type=fir.FIR_MLX90621) # Allocate another frame buffer for smoother video. extra_fb = sensor.alloc_extra_fb(sensor.width(), sensor.height(), sensor.RGB565) # FPS clock clock = time.clock() while (True): clock.tick() # Capture an image img = sensor.snapshot() # Capture FIR data # ta: Ambient temperature # ir: Object temperatures (IR array) # to_min: Minimum object temperature # to_max: Maximum object temperature ta, ir, to_min, to_max = fir.read_ir() if not ALT_OVERLAY: # Scale the image and belnd it with the framebuffer fir.draw_ir(img, ir) else: # Create a secondary image and then blend into the frame buffer. extra_fb.clear() fir.draw_ir(extra_fb, ir, alpha=256) img.blend(extra_fb, alpha=128) # Draw ambient, min and max temperatures. #img.draw_string(8, 0, "Ta: %0.2f C" % ta, color = (255, 0, 0), mono_space = False) #img.draw_string(8, 8, "To min: %0.2f C" % to_min, color = (255, 0, 0), mono_space = False) #img.draw_string(8, 16, "To max: %0.2f C"% to_max, color = (255, 0, 0), mono_space = False) # Force high quality streaming... img.compress(quality=90) # Print FPS. print(clock.fps()) -
测距模块和串口通信冲突怎么办?发布在 OpenMV Cam
我想把测距模块返回的距离通过TXRX串口传给Arduino,可是报错Errno 19: ENODEV
from pyb import UART,Servo from machine import I2C from vl53l1x import VL53L1X uart = UART(3, 9600, timeout_char=1000) i2c=I2C(2)#初始化 juli=VL53L1X(i2c) while(True): distance = int(juli.read()/10)#K/Lm uart.write(send_data) print(distance) -
RE: 如何在色块识别的框的范围内进行颜色替换?发布在 OpenMV Cam
@kidswong999 在 如何在色块识别的框的范围内进行颜色替换? 中说:
max_blob=find_max(blobs) img.flood_fill(max_blob.cx(), max_blob.cy(), seed_threshold=0.2, floating_thresholds=1, color=(255, 255, 0), invert=False, clear_background=False)
这我也试过了,这样就只有中心点是一个黄色的点,我是想把整个红色瓶盖换成别的颜色 -
如何在色块识别的框的范围内进行颜色替换?发布在 OpenMV Cam
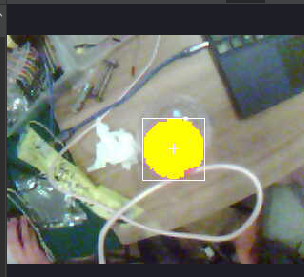
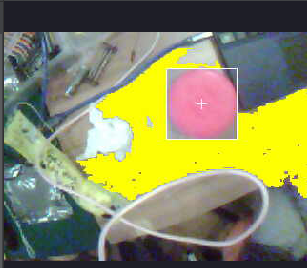

思路是先识别色块,然后在框内进行flood_fill的操作
我想完成图1的效果,但是经常出现图2图3的样子我试过将flood_fill的(x,y)替换成色块识别的中心点,但是这样就没法填充了
以下是代码:# 洪水填充 # # 此示例显示图像中的洪水填充区域。 import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) # or GRAYSCALE... sensor.set_framesize(sensor.QVGA) # or QQVGA... sensor.skip_frames(time = 2000) sensor.set_auto_whitebal(False); print("Learning thresholds...") threshold = (58, 91, 20, 60, -15, 18) def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3]>max_size: max_blob=blob max_size=blob[2]*blob[3] return max_blob while(True): # seed_threshold controls the maximum allowed difference between # the initial pixel and any filled pixels. It's important to # set this such that flood fill doesn't fill the whole image. # floating_threshold controls the maximum allowed difference # between any two pixels. This can easily fill the whole image # with even a very low threshold. # flood_fill will fill pixels that both thresholds. # You can invert what gets filled with "invert" and clear # everything but the filled area with "clear_background". #从中心点开始寻找,(x,y)即为Initial pixel x = sensor.width()//2 y = sensor.height()//2 img = sensor.snapshot()#从摄像头snapshot图像 blobs=img.find_blobs([threshold], pixels_threshold=100, area_threshold=100, merge=True, margin=10) if blobs: #寻找最大物体 max_blob=find_max(blobs) #设定ROI范围为最大物体的框 roi=img.draw_rectangle(max_blob.rect()) #在框中心点画十字 img.draw_cross(max_blob.cx(), max_blob.cy()) #x=max_blob.cx() #y=max_blob.cy() #在ROI中进行填充 roi.flood_fill(x, y, seed_threshold=0.2, floating_thresholds=1, color=(255, 255, 0), invert=False, clear_background=False)