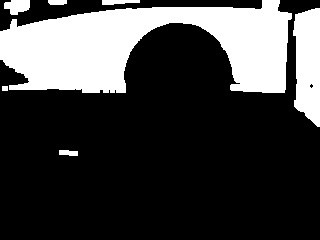
 如上图,因为地面和球体是同色的,使用二值化后的圆和地面是融在一起的,直接用find_circle()函数识别不出来,请问有没有可以识别圆弧或者不完整的圆的方法呢?
如上图,因为地面和球体是同色的,使用二值化后的圆和地面是融在一起的,直接用find_circle()函数识别不出来,请问有没有可以识别圆弧或者不完整的圆的方法呢?
N
nlsd
@nlsd
0
声望
5
楼层
585
资料浏览
0
粉丝
0
关注
nlsd 发布的帖子
-
怎样识别视野中不完整的圆?发布在 OpenMV Cam
-
外部中断报错:ValueError: ExtInt Vector 3 is already in used发布在 OpenMV Cam
#其他初始化代码... #中断定义: 来自32单片机的回调函数 def callback(line): global read_flag read_flag = 1 extint = pyb.ExtInt('P9', pyb.ExtInt.IRQ_FALLING, pyb.Pin.PULL_UP, callback) #主程序 while(True): clock.tick() if(read_flag ==1): #接收串口数据并置各种标志位... elif(read_flag ==0 and mode ==1): #进行口罩检测.... elif(read_flag == 0 and mode == 2): #进行人脸检测.... elif(read_flag == 0 and mode == 3): #进行机器学习... print("read_flag", read_flag) clock.fps()我的程序框架如上,需要打开UART串行端口接受32单片机的数据来进行模式选择,但是每当我第一次运行代码时会报错:
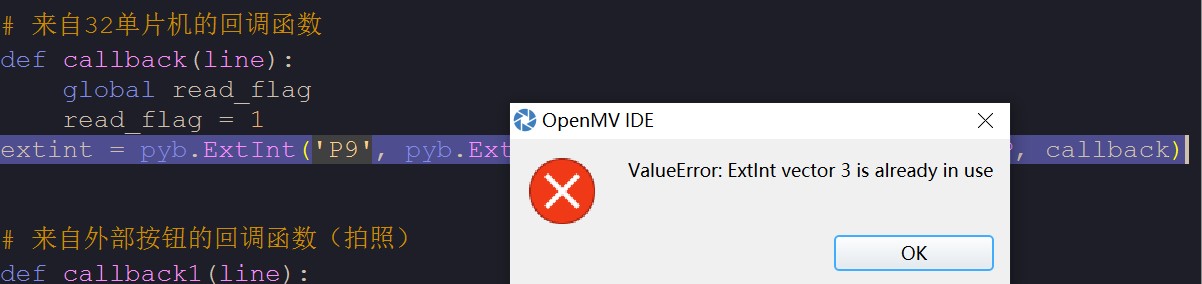
可是之后再运行就不会报错,而且整个程序运行也很顺畅。请问这个原因是什么呢?
我能否直接用try...excpet...语句块处理这个错误呢?这样会让这个中断定义生效吗?try: # 来自32单片机的回调函数 def callback(line): global read_flag read_flag = 1 extint = pyb.ExtInt('P9', pyb.ExtInt.IRQ_FALLING, pyb.Pin.PULL_UP, callback) except ValueError: pass -
关于色块识别中blob.rotation_reg()函数的返回值发布在 OpenMV Cam
色块识别有一个返回值是blob.rotation_reg(),请问如果色块是正方形,那么这个函数返回的是什么值呢?
 比如说在上图中,正方形正对于相机,返回值是30°左右。
比如说在上图中,正方形正对于相机,返回值是30°左右。
但是在下图中,正方形相对于相机旋转了45°,可是返回值却是20°左右。

-
两个延时函数的区别?发布在 OpenMV Cam
time.sleep_ms()和pyb.delay()这两个函数有啥区别呢?在运行下面这个实时时钟的时候感觉这两个函数没有什么不同。
import time, pyb from pyb import RTC rtc = RTC() rtc.datetime((2013, 7, 9, 2, 0, 0, 0, 0)) while (True): print(rtc.datetime()) time.sleep_ms(1000) #pyb.delay(1000) -
OpenMV内置的ADC最高的采样频率有多高?发布在 OpenMV Cam
官方例程里面给出了一个ADC采样的示例代码,使用定时器的频率来控制采样的,我的困惑是ADC最高的采样频率有多高?也就是tim = pyb.Timer(8, freq=10)中freq最大可以设置为多高?
adc = pyb.ADC(pyb.Pin("P6")) # create an ADC on pin P6 tim = pyb.Timer(8, freq=10) # create a timer running at 10Hz buf = bytearray(1000) # creat a buffer to store the samples adc.read_timed(buf, tim) # sample 100 values, taking 10s