@kidswong999 如果我想把识别的结果发送到去其他单片机用串口怎么做,希望提供相关代码参考
N
nga5
@nga5
0
声望
19
楼层
660
资料浏览
0
粉丝
1
关注
nga5 发布的帖子
-
如果我想把识别的结果发送到去其他单片机用串口怎么做,希望提供相关代码参考发布在 OpenMV Cam
-
为什么没有定义,怎么解决发布在 OpenMV Cam
请在这里粘贴代码import sensor, image, time import network, usocket, ujson from servo import Servos s1 = Servo(1) # P7 s2 = Servo(2) # P8 # 初始化摄像头和PWM输出口 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) net = None labels = None try: # load the model, alloc the model file on the heap if we have at least 64K free after loading net = tf.load("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024))) except Exception as e: print(e) raise Exception('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')') try: labels = [line.rstrip('\n') for line in open("labels.txt")] except Exception as e: raise Exception('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')') s1.angle(0) clock = time.clock() shuji_index = 0 while(True): img = sensor.snapshot() for obj in net.classify(img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5): print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect()) img.draw_rectangle(obj.rect()) if obj.output()[shuji_index] > 0.6: s1.angle(180) else: s1.angle(0) time.sleep(1) 这个代码为什么报错,怎么解决希望提供代码支持。 项目:垃圾分拣edge impulse训练的模型用OPEN MV H4 plus 识别,然后控制舵机进行旋转90°,用的是官方配的舵机和舵机扩展版,一共需要两个舵机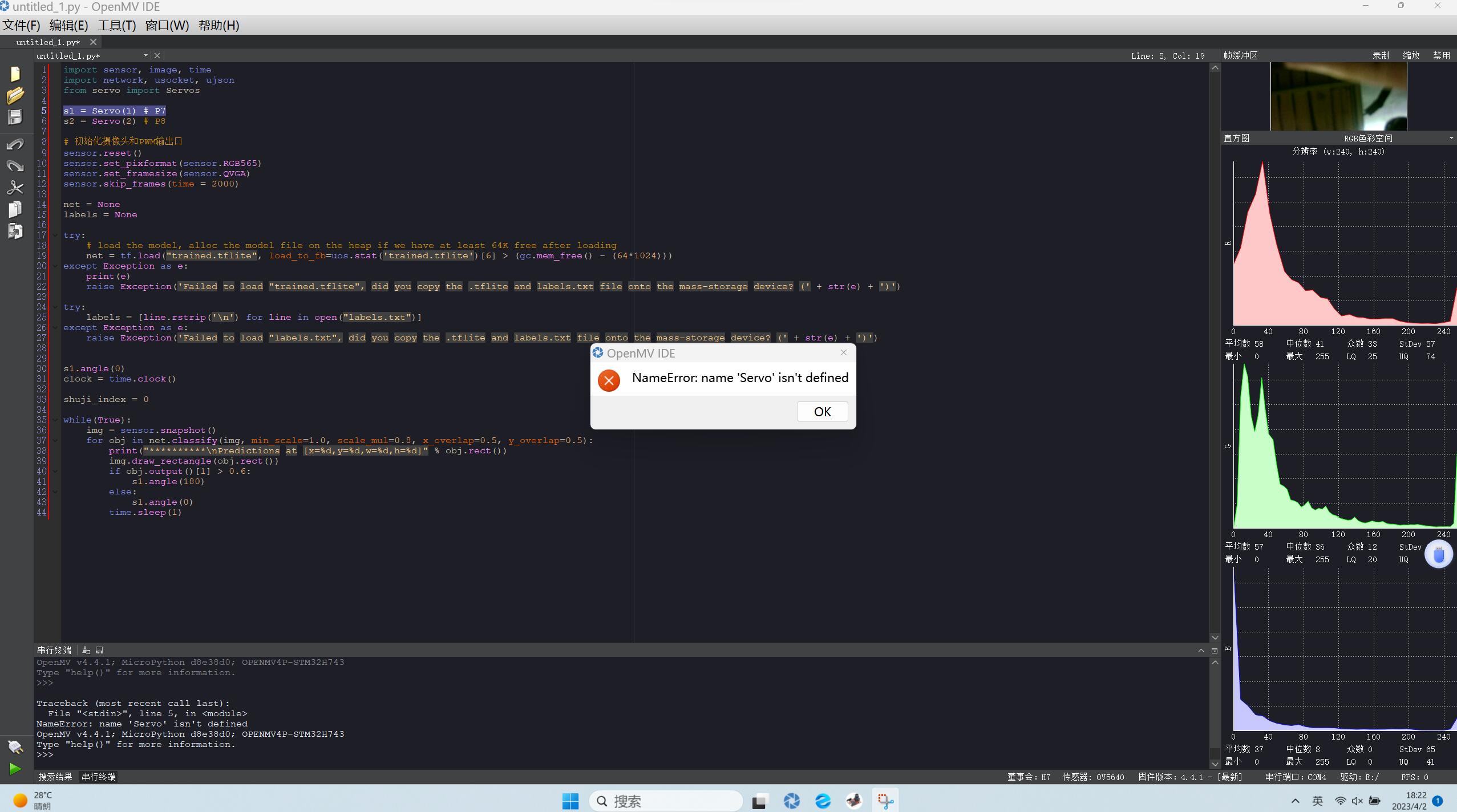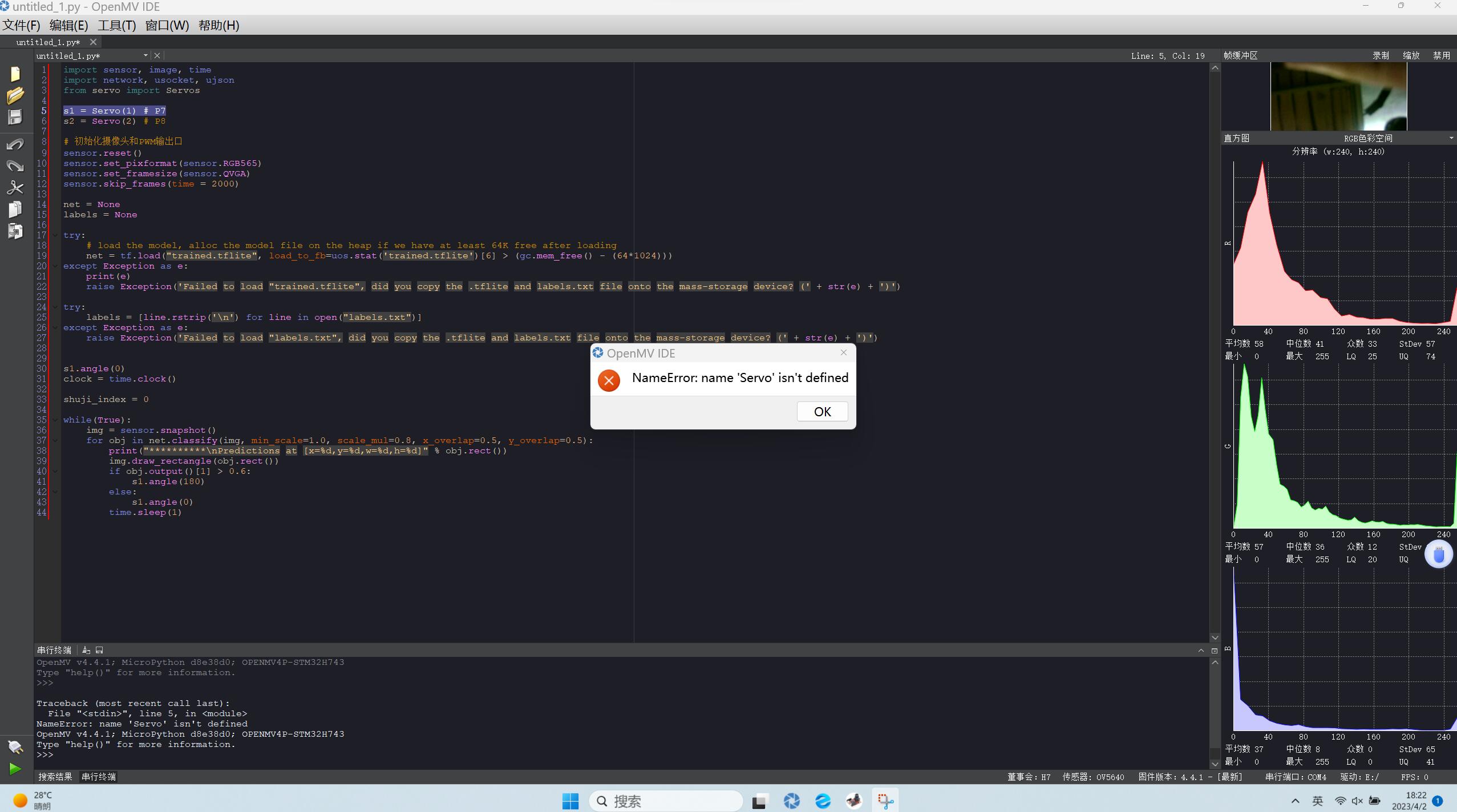
-
RE: edge lmpulse建立的模型部署到OPEN MV H7 PLUS信号传递问题发布在 OpenMV Cam
@kidswong999 edge lmpulse建立的模型是通过你给的代码直接到进去的吗,没看到模型导入的代码,只看到了标签的
-
RE: edge lmpulse建立的模型部署到OPEN MV H7 PLUS信号传递问题发布在 OpenMV Cam
@kidswong999 在 edge lmpulse建立的模型部署到OPEN MV H7 PLUS信号传递问题 中说:
s1 = Servo(1) # P7
s2 = Servo(2) # P8
你这个是定义到open mv 上的吗。还是说舵机扩展版上的