线性回归什么才能让那条回归线不抖就是这个函数get_regression()
M
mcag 发布的帖子
-
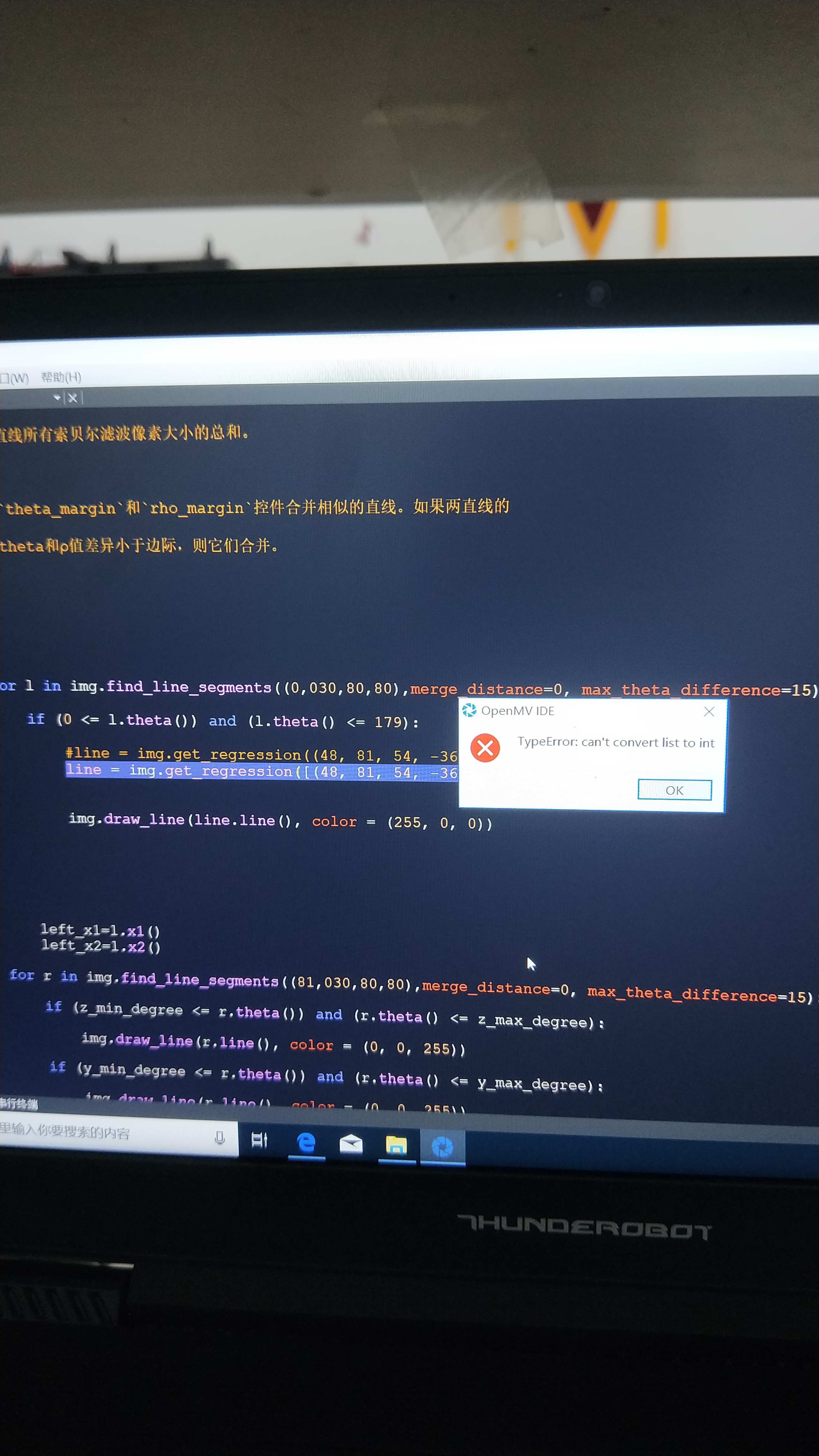
image.get_regression()这个函数加感兴趣区正确的格式怎么写发布在 OpenMV Cam
line = img.get_regression([(48, 81, 54, -36, 31, 85)],[(0,030,80,80)])这个是我写的但是一加上后面的[(0,030,80,80)]感兴趣区就运行错误
-
关于感兴趣区的问题其中的y是几进制数发布在 OpenMV Cam
ROIS = [ # [ROI, weight] (0, 100, 160, 20, 0.7), # You'll need to tweak the weights for you app (0, 050, 160, 20, 0.3), # depending on how your robot is setup. (0, 000, 160, 20, 0.1) ] #roi代表三个取样区域,(x,y,w,h,weight),代表左上顶点(x,y)宽高分别为w和h的矩形, #weight为当前矩形的权值。注意本例程采用的QQVGA图像大小为160x120,roi即把图像横分成三个矩形。 #三个矩形的阈值要根据实际情况进行调整,离机器人视野最近的矩形权值要最大, #如上图的最下方的矩形,即(0, 100, 160, 20, 0.7)这段代码中的100, 050,000是八进制数???
-
舵机输出的pwm和电机的有冲突发布在 OpenMV Cam
import car
from pyb import Servo想同时实现舵机电机控制但是加上import car这句话后舵机输出的pwm就不对了