@kidswong999 另外想问下有没有方法做一个白底黑色圆的蒙版的方法?
M
m1aw 发布的帖子
-
蒙版mask使用问题发布在 OpenMV Cam
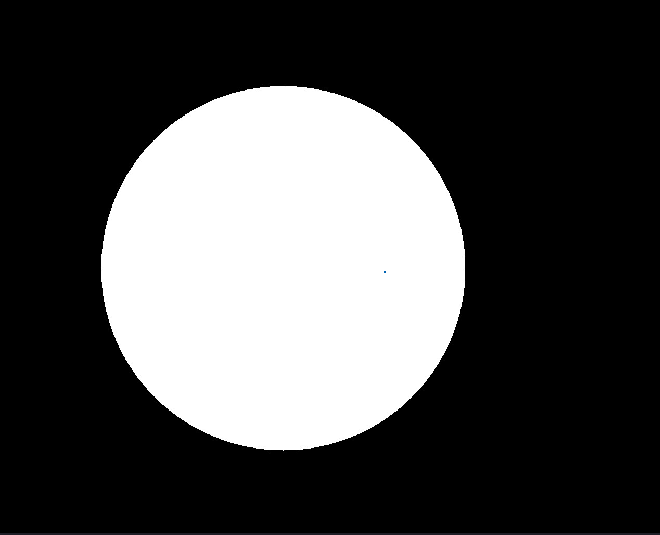
mask为全黑图片中有个白色的圆,如下图:
在clear中使用该mask,想要达到的效果应该是中间白色圆部分变黑,但实际却得到了些很奇怪的结果,如下图: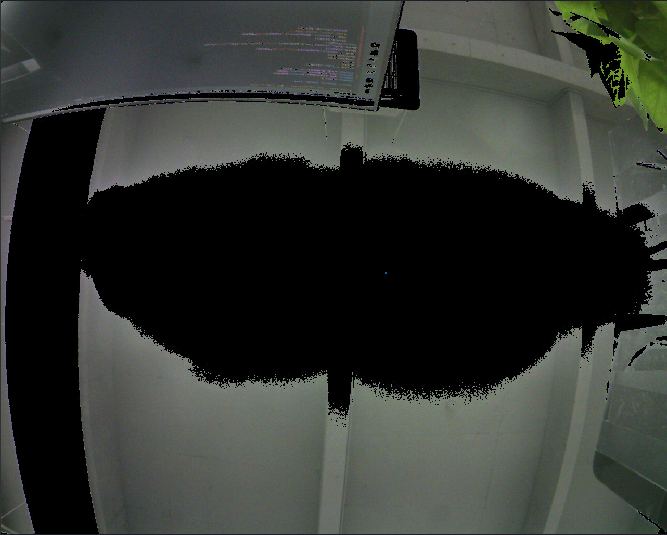
代码如下:# Untitled - By: User6151644 - 周三 10月 11 2023 import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.SXGA) sensor.skip_frames(time = 2000) clock = time.clock() x=544 y=515 radius1=286 radius2=350 mask = sensor.snapshot(copy_to_fb=False) mask.clear() mask.draw_circle((x,y,radius2),color=(255,255,255),fill=True) while(True): clock.tick() img = sensor.snapshot().clear(mask=mask) print(clock.fps())所用机器是openmv4h7plus
-
RuntimeError:Frame size is not supported or is not set 错误发布在 OpenMV Cam
openmv4H7 set_windowing后报错
import sensor, image, time from pyb import USB_VCP usb = USB_VCP() sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.VGA) sensor.skip_frames(time = 2000) sensor.set_windowing((134,243,113,110)) clock = time.clock() img = sensor.snapshot() while(True): clock.tick() img = sensor.snapshot()请问这是什么问题
-
虚拟串口如何得到int型数据?发布在 OpenMV Cam
想通过虚拟串口接收int数据,但是以下代码却得不到想要的结果。本来应该是发送1,led灯会亮,但是实际上却不行

代码:import sensor, image, time, ustruct from pyb import USB_VCP,LED green_led = LED(2) red_led = LED(1) usb = USB_VCP() sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.skip_frames(time = 2000) # Wait for settings take effect. while(True): if USB_VCP.any(): cmd = usb.readline().decode().strip() val = int(cmd) if (val == 1): green_led.on() -
图片直接发送和获取每个像素值单独发送有区别?发布在 OpenMV Cam
获取img每个像素单独发送
img直接发送
想要图片分开发送,但是发现像素值单独发送接受到的内容和直接发送图片有区别,请问是为什么?
-
RE: 想将图片分包用串口发送,出错发布在 OpenMV Cam
@kidswong999 在 想将图片分包用串口发送,出错 中说:
要么获取每个像素值单独发送
如何获取每个像素值?另外我看以前的帖子不是可以这样操作的吗https://forum.singtown.com/topic/5532/%E5%A6%82%E4%BD%95%E5%B0%86%E6%8B%8D%E6%91%84%E7%9A%84%E5%9B%BE%E7%89%87%E5%8E%8B%E7%BC%A9%E5%B9%B6%E4%B8%94%E5%88%86%E5%8C%85
-
想将图片分包用串口发送,出错发布在 OpenMV Cam
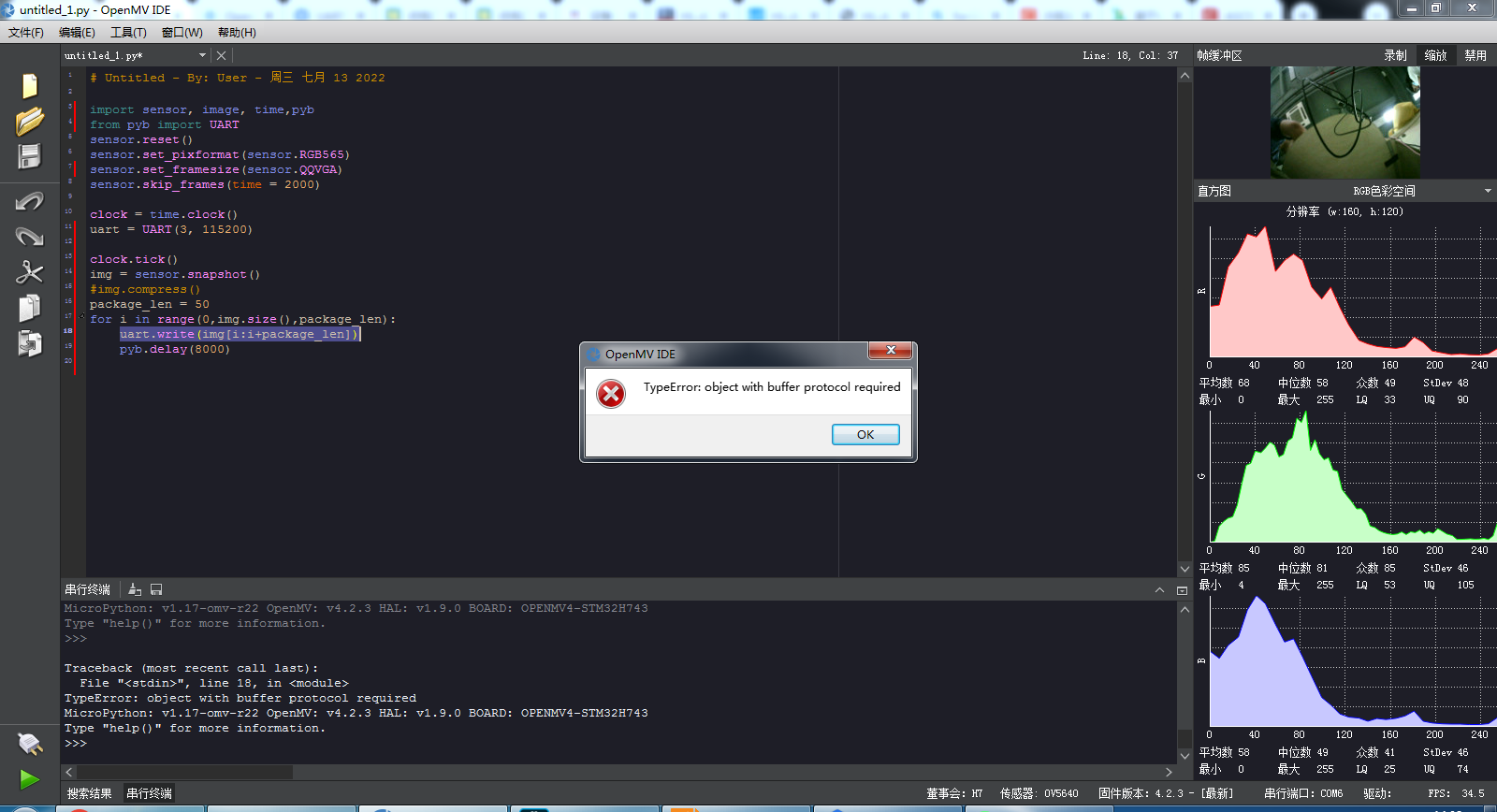
将图片分包用串口发送,但是出现图中错误
代码为:import sensor, image, time,pyb from pyb import UART sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() uart = UART(3, 115200) clock.tick() img = sensor.snapshot() #img.compress() package_len = 50 for i in range(0,img.size(),package_len): uart.write(img[i:i+package_len]) pyb.delay(8000)