你的目标值和测量值都代表什么意思?
目标值是期望值吗?
lehz 发布的帖子
-
OpenMV变砖,好像彻底凉透,返厂维修费用大概是多少啊?发布在 OpenMV Cam
OpenMV变砖了,无法DFU升级,计算机也没有发现新端口。这个好像是坏的很彻底。怎么办?返厂维修费用大概是多少啊?返厂地址是什么?
-
openmv4 h7 plus套件的透明保护壳,有图无实物发布在 OpenMV Cam
在淘宝网上有一个透明保护壳,当我买了openmv4 h7 plus套件时,打开了包裹,发现透明保护壳不在包裹中
而客服表示,保护壳没有写在list的单子上。但那个保护壳却一直在照片里。怎么说?

-
RE: 教程的测距代码,使用了ov5640,framesize改为sensor.FHD,报错memory erros,为何?发布在 OpenMV Cam
@kidswong999
感谢回复。
没有改动程序。没有错误。不知道是不是以后还会抽筋。 -
RE: 教程的测距代码,使用了ov5640,framesize改为sensor.FHD,报错memory erros,为何?发布在 OpenMV Cam
ide 3.0.3,windows7 ,openmv4 H7
-
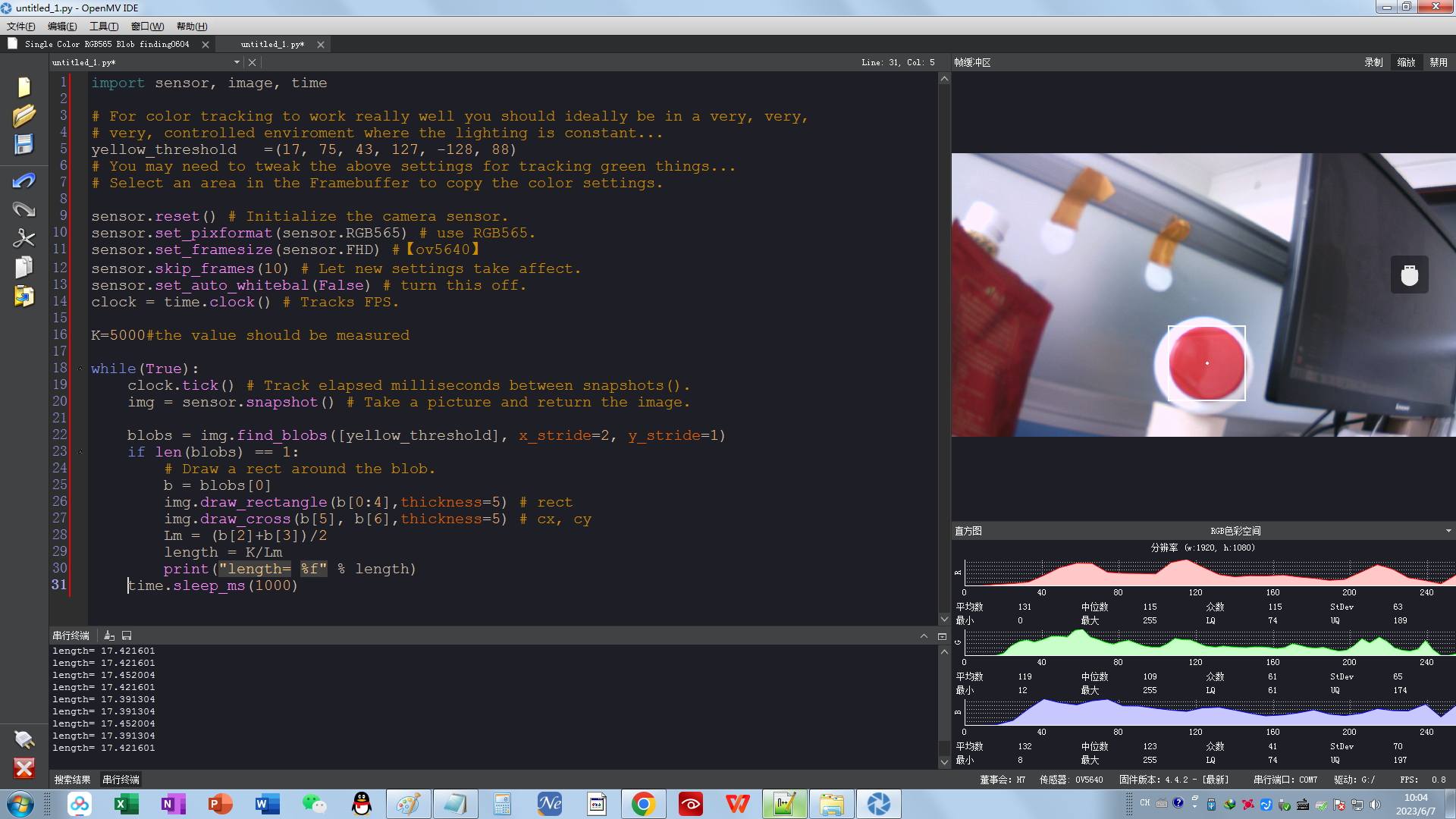
教程的测距代码,使用了ov5640,framesize改为sensor.FHD,报错memory erros,为何?发布在 OpenMV Cam
# Measure the distance # # This example shows off how to measure the distance through the size in imgage # This example in particular looks for yellow pingpong ball. import sensor, image, time # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... yellow_threshold = (2, 85, -128, 127, 18, 64) # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.FHD) #【ov5640】 sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. K=5000#the value should be measured while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([yellow_threshold], x_stride=2, y_stride=1) if len(blobs) == 1: # Draw a rect around the blob. b = blobs[0] img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy Lm = (b[2]+b[3])/2 length = K/Lm print(length) #print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while # connected to your computer. The FPS should increase once disconnected.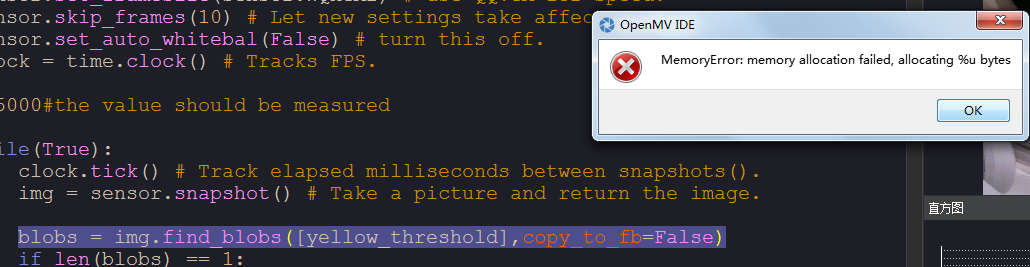
以为是内容的问题,插入了sd新卡,仍旧报错。
请大佬不吝指点。谢谢