@15009206548 怎么加的发个示例看看谢谢大神们
L
ldgw
@ldgw
0
声望
4
楼层
759
资料浏览
0
粉丝
0
关注
ldgw 发布的帖子
-
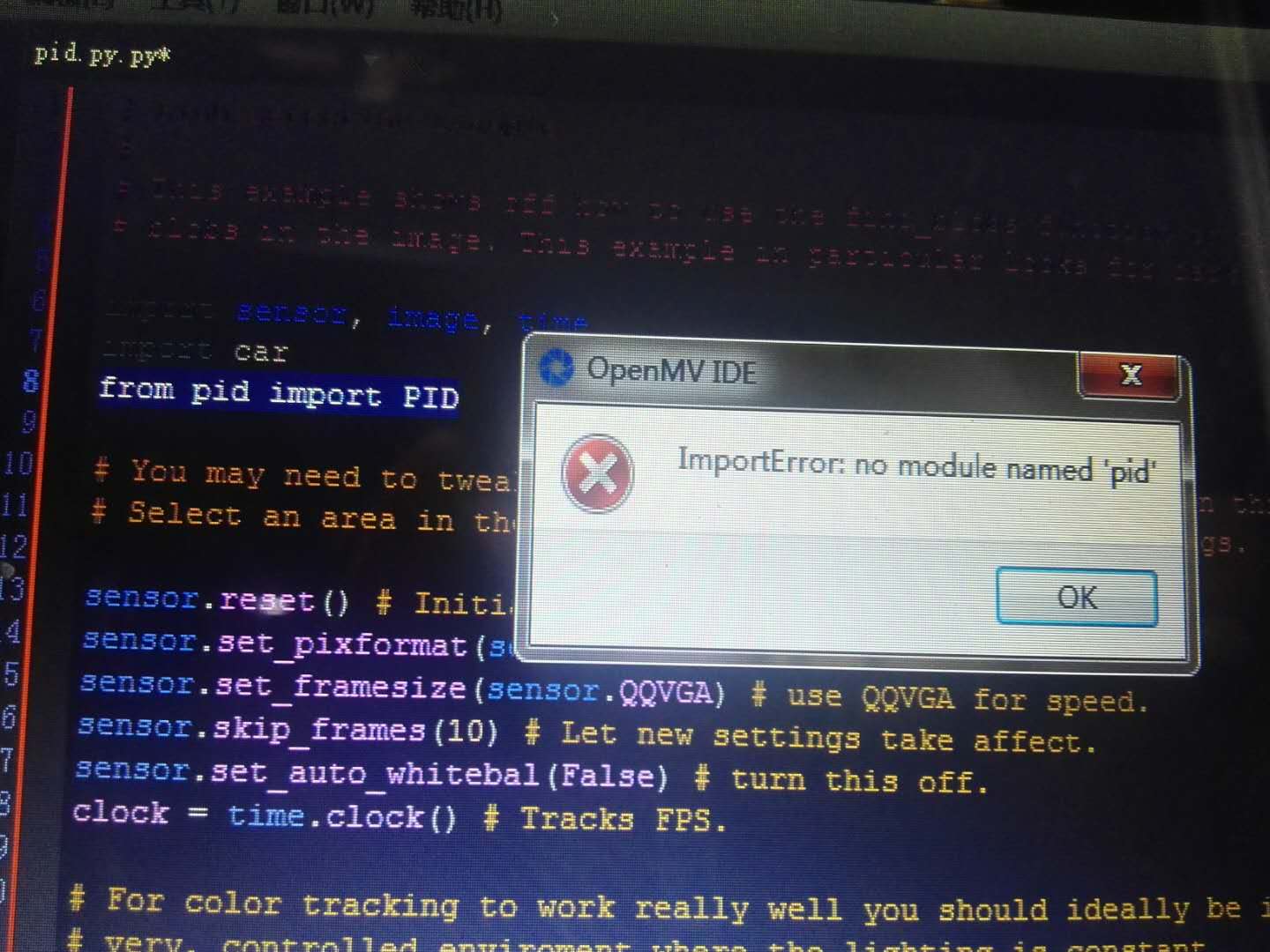
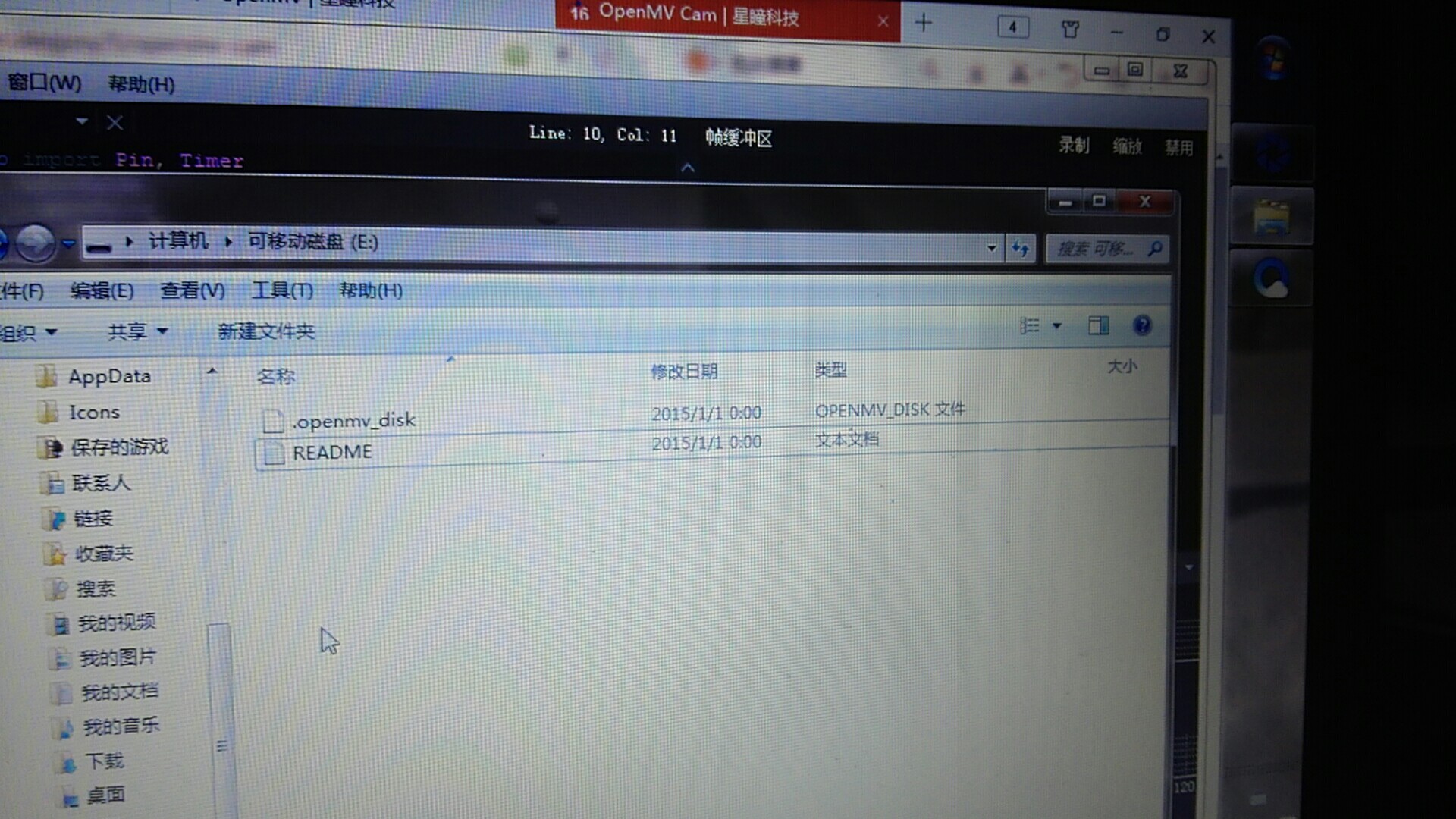
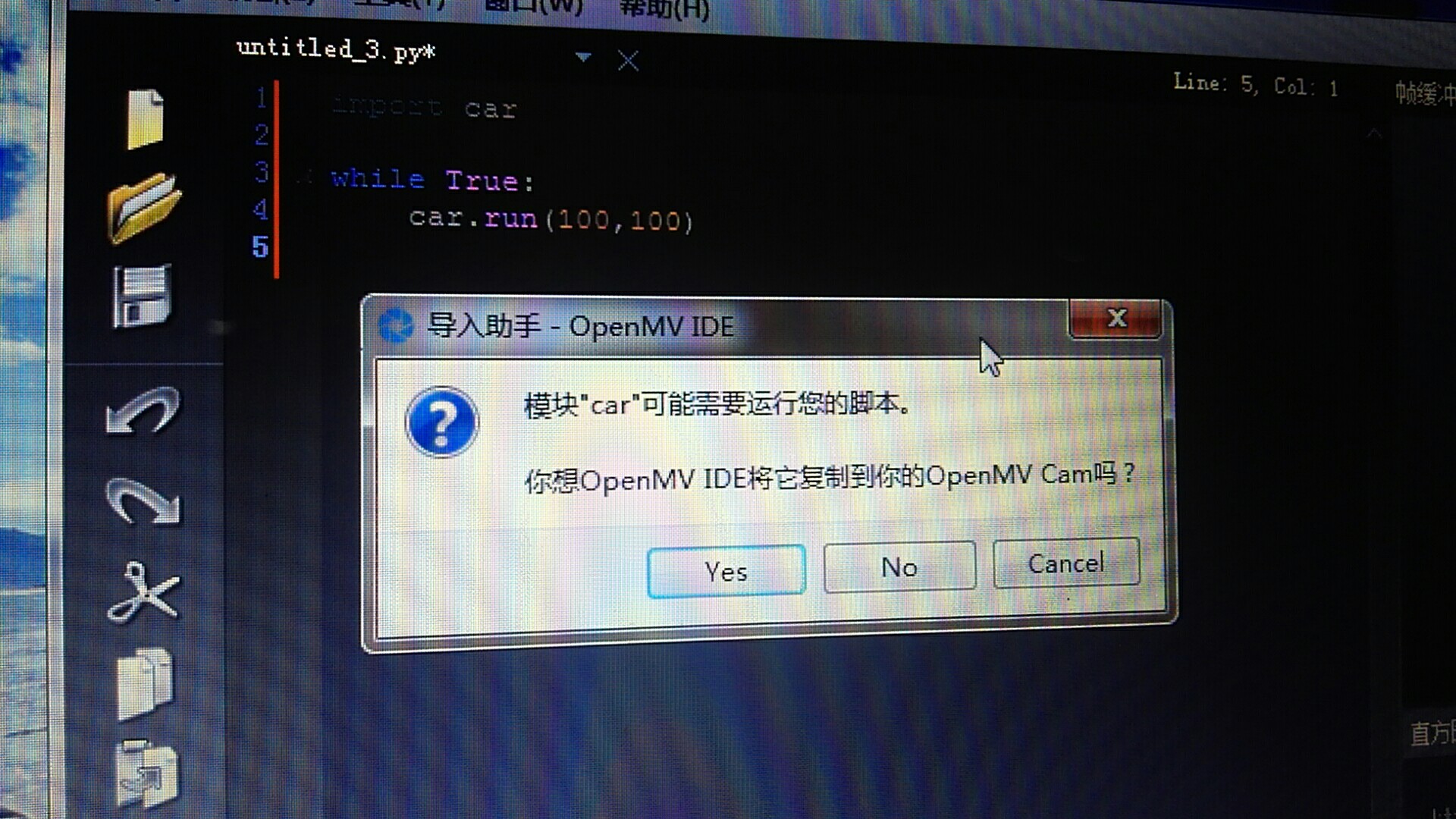
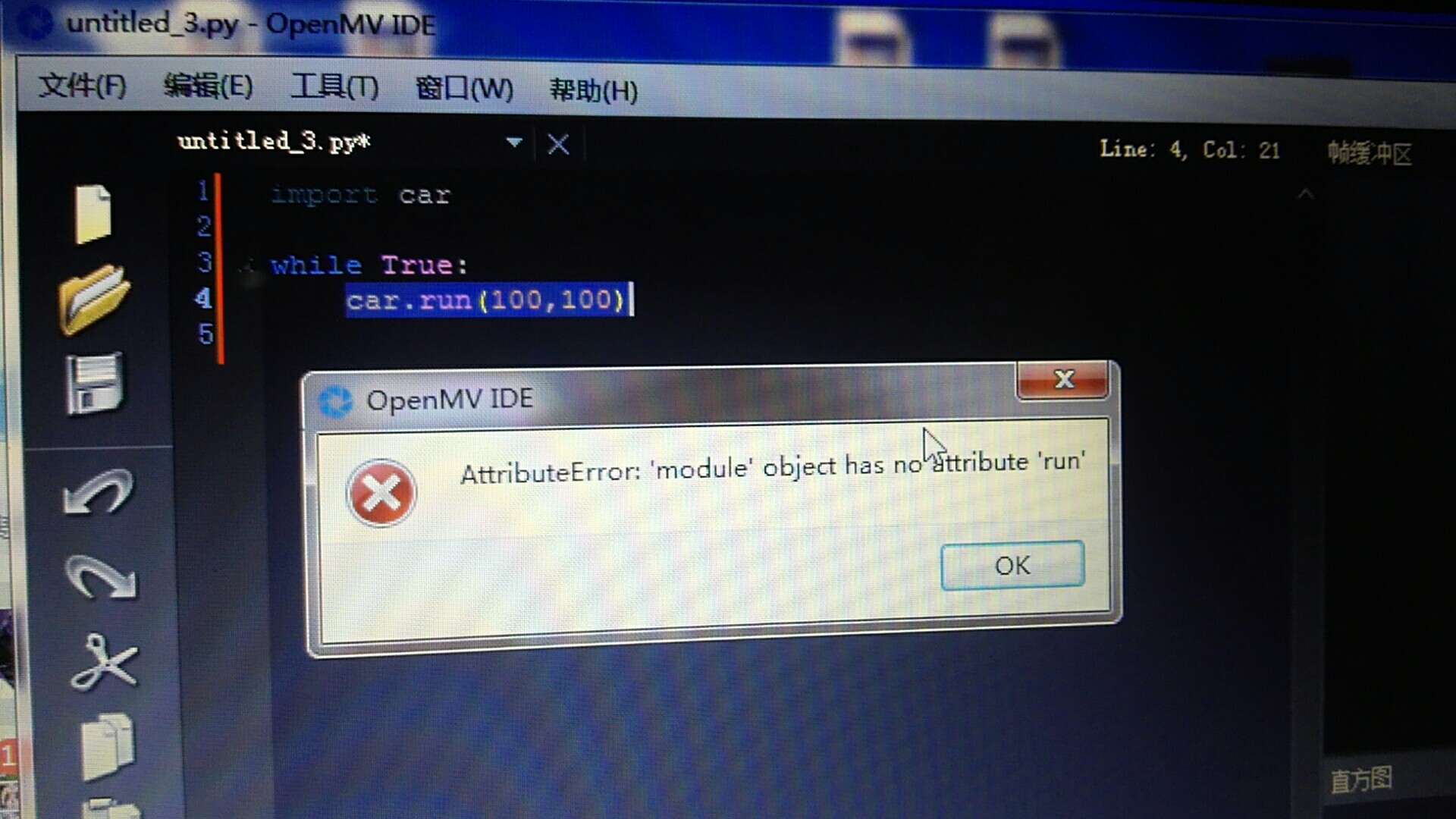
系统报错大师指点怎么处理?发布在 OpenMV Cam
 from pyb import Pin, Timer
from pyb import Pin, Timer
inverse_left=False #change it to True to inverse left wheel
inverse_right=False #change it to True to inverse right wheelain1 = Pin('P0', Pin.OUT_PP)
ain2 = Pin('P1', Pin.OUT_PP)
bin1 = Pin('P2', Pin.OUT_PP)
bin2 = Pin('P3', Pin.OUT_PP)
ain1.low()
ain2.low()
bin1.low()
bin2.low()pwma = Pin('P7')
pwmb = Pin('P8')
tim = Timer(4, freq=1000)
ch1 = tim.channel(1, Timer.PWM, pin=pwma)
ch2 = tim.channel(2, Timer.PWM, pin=pwmb)
ch1.pulse_width_percent(0)
ch2.pulse_width_percent(0)def run(left_speed, right_speed):
if inverse_left==True:
left_speed=(-left_speed)
if inverse_right==True:
right_speed=(-right_speed)if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(abs(left_speed))
import car while True: car.run(100,100)请在这里粘贴代码