买小车底板赠送的普通电机(如图),与教程上的GA12-N20电机有什么不同?GA12-N20的优点是什么?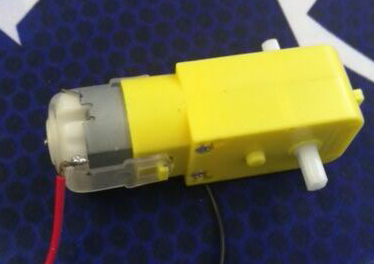
K
konker 发布的帖子
-
RE: 追小球小车的电源发布在 OpenMV Cam
@yuan 用普通五号电池给openmv和电机供电会不会使电压或电流不稳定啊。
我们用刚买的新电池供电car.run(50,-50)就可以跑,用一段时间就跑不动了,这是什么原因啊?怎么解决啊?万分感谢!!!(我们的小车载重较大) -
RE: 怎样才能提高 颜色形状(圆形)同时识别 的精度发布在 OpenMV Cam
import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking sensor.set_vflip(True) clock = time.clock() while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 100, r_step = 2): area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r()) #area为识别到的圆的区域,即圆的外接矩形框 statistics = img.get_statistics(roi=area)#像素颜色统计 print(statistics) #(0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。 #l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 0<statistics.l_mode()<100 and -17<statistics.a_mode()<38 and 40<statistics.b_mode()<92:#if the circle is red img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0))#识别到的红色圆形用红色的圆框出来 #judje = 1 #return true #else: #img.draw_rectangle(area, color = (255, 255, 255)) #将非红色的圆用白色的矩形框出来这是代码,我们把自动增益和白平衡关了和没关效果一样是怎么回事呢?
-
怎样才能提高 颜色形状(圆形)同时识别 的精度发布在 OpenMV Cam
我们想利用颜色形状同时识别的例程检测乒乓球,但效果并不好。请问大佬们有什么方法可以提高识别的精度呢。使用模块识别是不是可以提高精度呢?