THRESHOLD = (0, 50, -24,-1, -18, 6) # Grayscale threshold for dark things...
import sensor, image, time
from pyb import LED
import car
from pid import PID
rho_pid = PID(p=0.4, i=0)
theta_pid = PID(p=0.001, i=0)
#LED(1).on()
#LED(3).on()
sensor.reset()
sensor.set_vflip(True)
sensor.set_hmirror(True)
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQQVGA) # 80x60 (4,800 pixels) - O(N^2) max = 2,3040,000.
#sensor.set_windowing([0,20,80,40])
sensor.skip_frames(time = 2000)
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot().binary([THRESHOLD])
line = img.get_regression([(100,100,0,0,0,0)], robust = True)
if (line):
rho_err = abs(line.rho())-img.width()/2
if line.theta()>90:
theta_err = line.theta()-180
else:
theta_err = line.theta()
img.draw_line(line.line(), color = 127)
print(rho_err,line.magnitude(),rho_err)
if line.magnitude()>8:
#if -40<b_err<40 and -30<t_err<30:
rho_output = rho_pid.get_pid(rho_err,1)
theta_output = theta_pid.get_pid(theta_err,1)
output = rho_output+theta_output
car.run(50+output, 50-output)
else:
car.run(0,0)
else:
car.run(50,-50)
pass
#print(clock.fps())
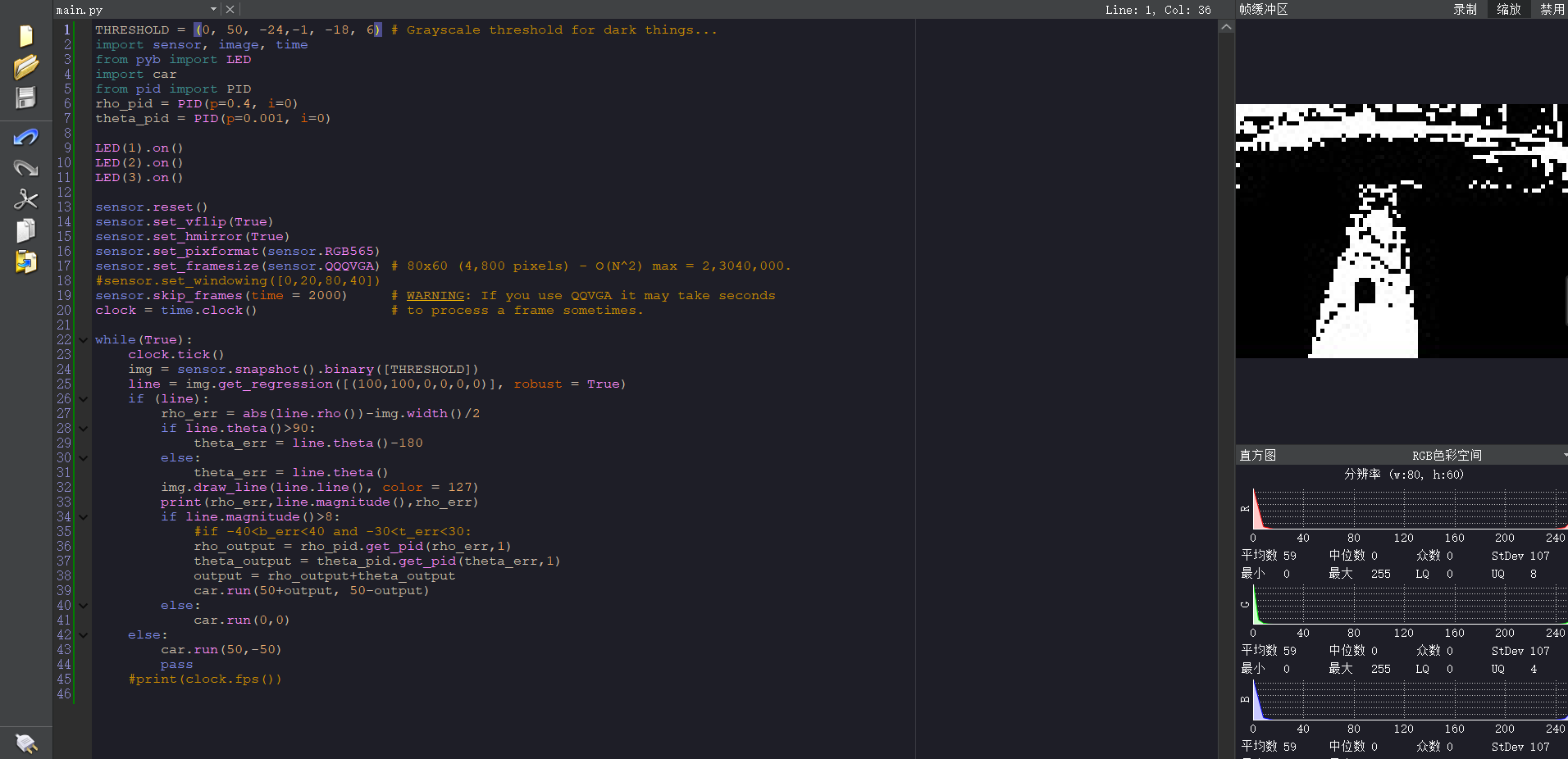
得不到线性回归后的直线