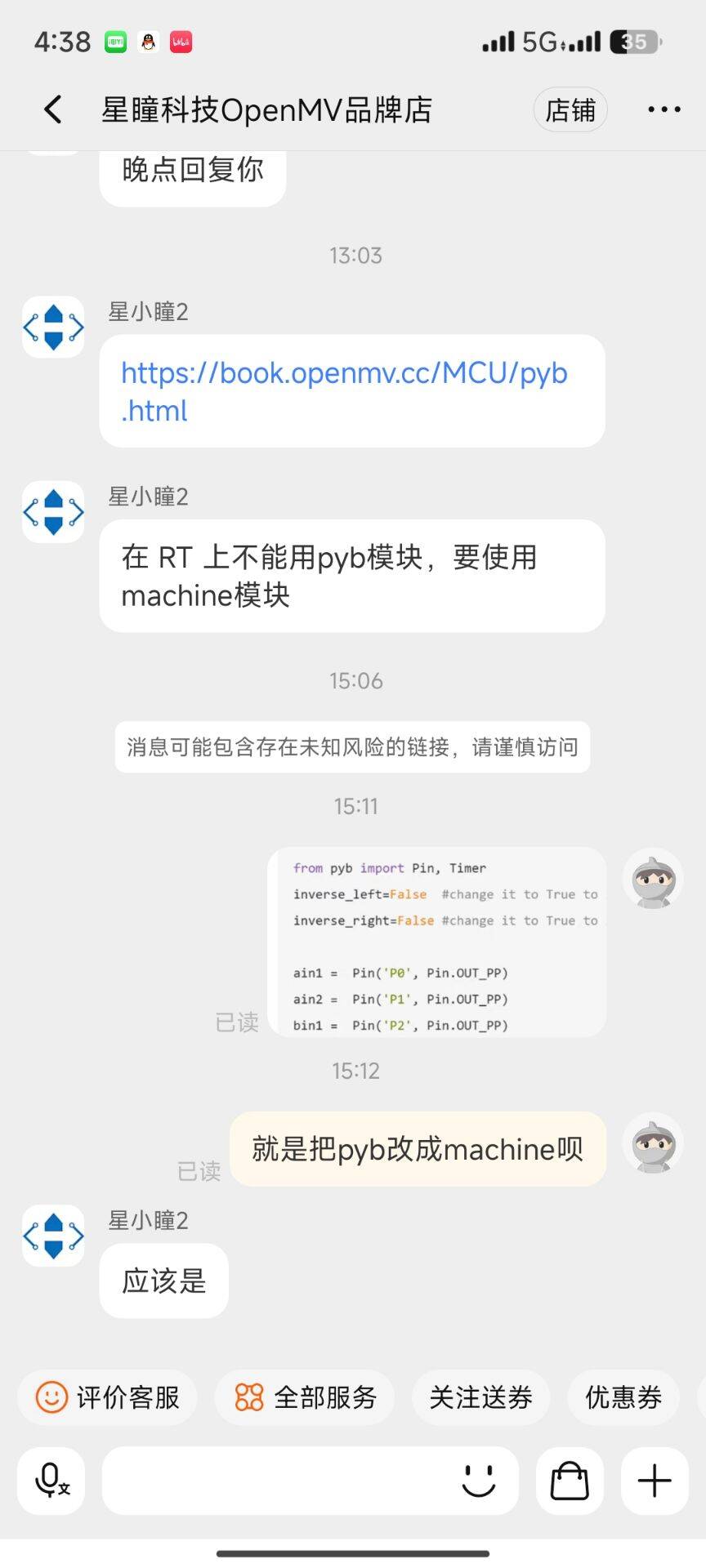
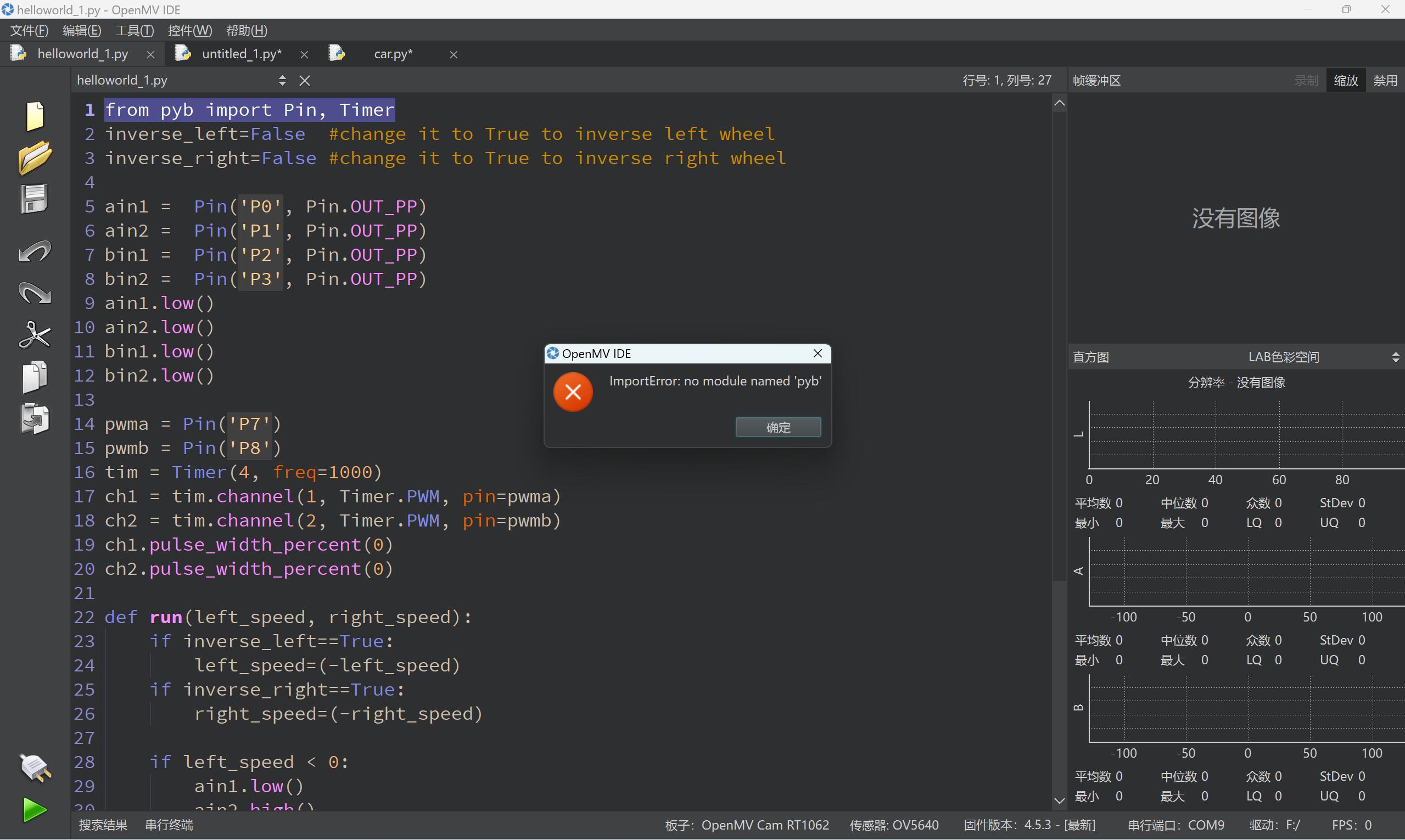
是pyb打错了,请大佬解答
I
i245
@i245
0
声望
4
楼层
253
资料浏览
0
粉丝
0
关注
i245 发布的帖子
-
把oyb换成machine自己改了一下,报错发布在 OpenMV Cam
from machine import Pin from machine import Timer inverse_left=False #change it to True to inverse left wheel inverse_right=False #change it to True to inverse right wheel ain1 = Pin('P0', Pin.OUT) ain2 = Pin('P1', Pin.OUT) bin1 = Pin('P2', Pin.OUT) bin2 = Pin('P3', Pin.OUT) ain1.low() ain2.low() bin1.low() bin2.low() pwma = Pin('P7') pwmb = Pin('P8') tim = Timer(-1, freq=1000) ch1 = tim.channel(1, Timer.PWM, pin=pwma) ch2 = tim.channel(2, Timer.PWM, pin=pwmb) ch1.pulse_width_percent(0) ch2.pulse_width_percent(0) def run(left_speed, right_speed): if inverse_left==True: left_speed=(-left_speed) if inverse_right==True: right_speed=(-right_speed) if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(int(abs(left_speed))) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(int(abs(right_speed))) -
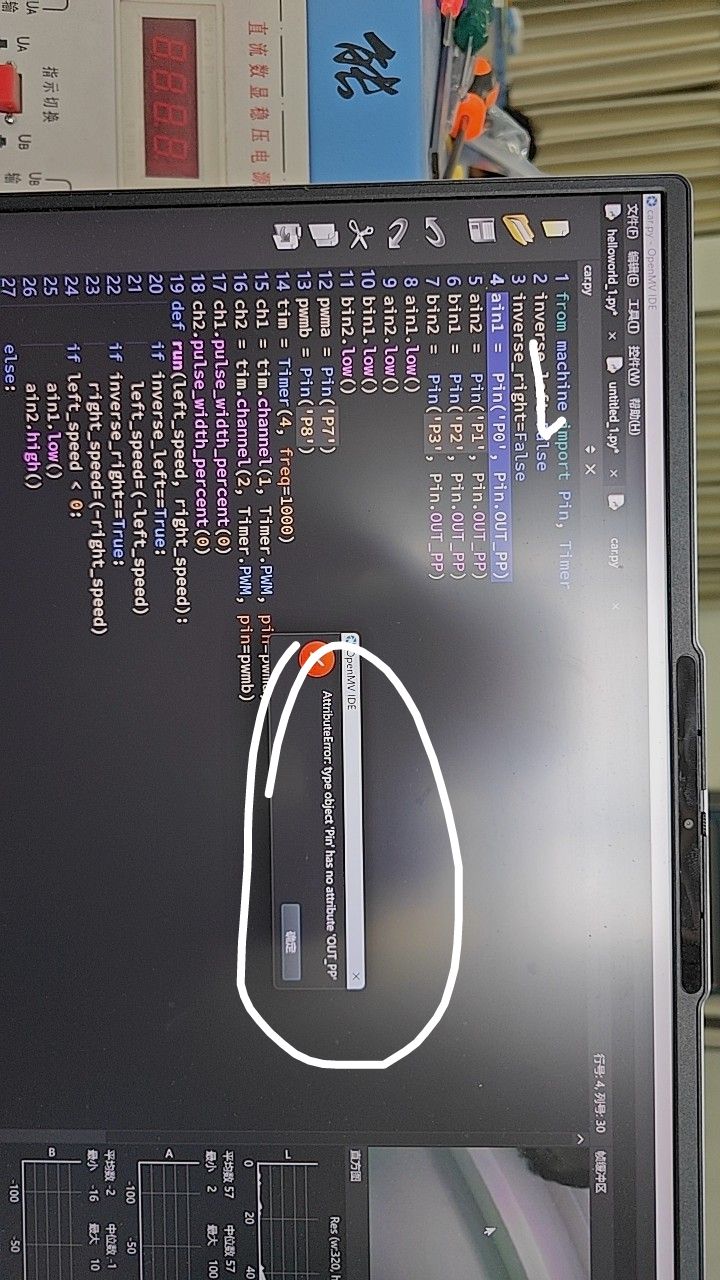
RE: 追小球的小车代码连接之后显示显示错误,把pyb改成machine又有别的错误发布在 OpenMV Cam
from machine import Pin, Timer inverse_left=False inverse_right=False ain1 = Pin('P0', Pin.OUT_PP) ain2 = Pin('P1', Pin.OUT_PP) bin1 = Pin('P2', Pin.OUT_PP) bin2 = Pin('P3', Pin.OUT_PP) ain1.low() ain2.low() bin1.low() bin2.low() pwma = Pin('P7') pwmb = Pin('P8') tim = Timer(4, freq=1000) ch1 = tim.channel(1, Timer.PWM, pin=pwma) ch2 = tim.channel(2, Timer.PWM, pin=pwmb) ch1.pulse_width_percent(0) ch2.pulse_width_percent(0) def run(left_speed, right_speed): if inverse_left==True: left_speed=(-left_speed) if inverse_right==True: right_speed=(-right_speed) if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(int(abs(left_speed))) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(int(abs(right_speed))) -
追小球的小车代码连接之后显示显示错误,把pyb改成machine又有别的错误发布在 OpenMV Cam
请在这里粘贴代码请在这里粘贴代码请在这里粘贴代码