import sensor, image, time
from machine import UART
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
uart = UART(3,19200)
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot().lens_corr(strength = 1.5, zoom = 1.0)
for c in img.find_circles(threshold = 3500, x_margin = 2, y_margin = 2, r_margin = 10,
r_min = 2, r_max = 100, r_step = 2):
area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r())
#area为识别到的圆的区域,即圆的外接矩形框
statistics = img.get_statistics(roi=area)#像素颜色统计
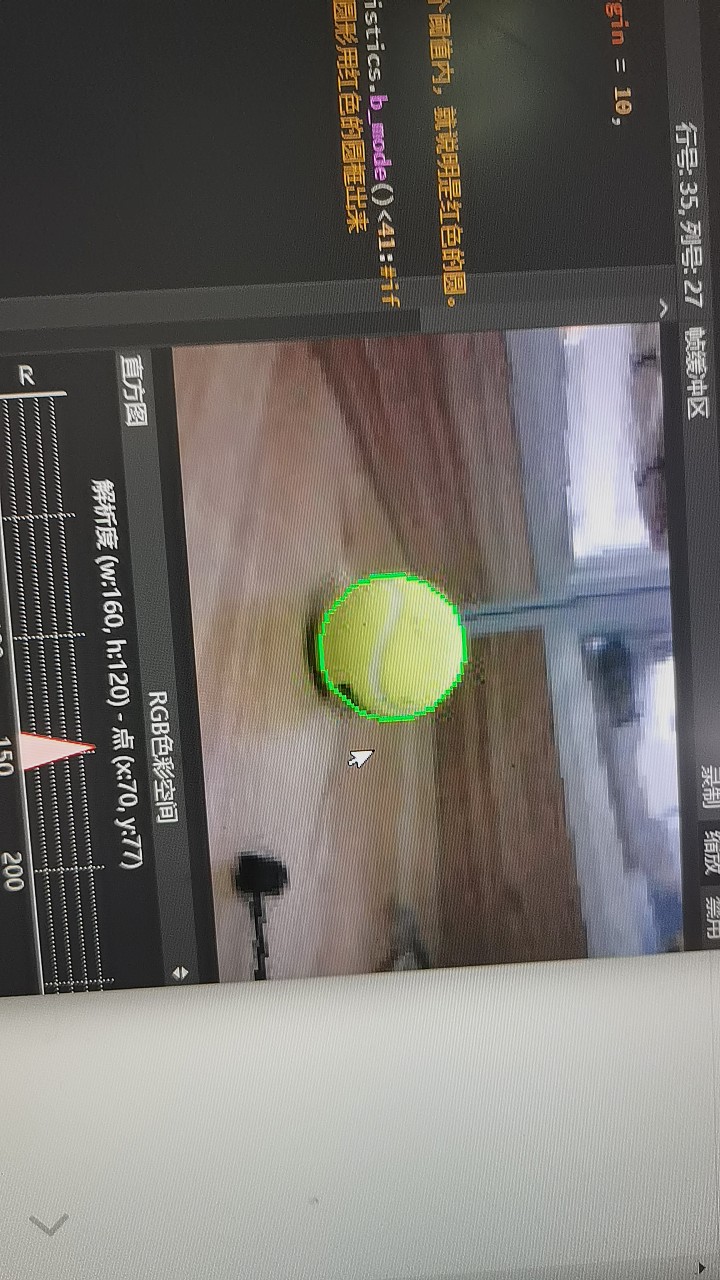
if 20<statistics.l_mode()<100 and -30<statistics.a_mode()<0 and -10<statistics.b_mode()<51:#if the circle is red
img.draw_circle(c.x(), c.y(), c.r(), color = (0, 255, 0))#识别到的红色圆形用红色的圆框出来
print("已找到目标!")
print(c.x(),c.y())
if (c.x()<70):
{
print("a")
}
elif(c.x()>90):
{
print("c")
}
elif(70<c.x()<90):
print("b")
else:
img.draw_rectangle(area, color = (255, 255, 255))
print("找劈叉了")
#将非红色的圆用白色的矩形框出来
uart.write("Hello World!\r")
time.sleep_ms(10)
#print("FPS %f" % clock.fps())
#roi=(66, 99, -19, -2, -2, 31)
#(25, 61, -25, -9, -1, 52)
G
g24c 发布的帖子
-
RE: 为什么我用颜色形状同时识别时候,检测两边的图像那么费劲,有改善解决的办法嘛发布在 OpenMV Cam