图中是我的openmv无法连接IDE,然后我重新刷固件,但是dfuse 软件中target id 的框中只有两个文件,但是我看视频中的有4个文件,固件下载完以后还是不能工作,这是怎么回事啊?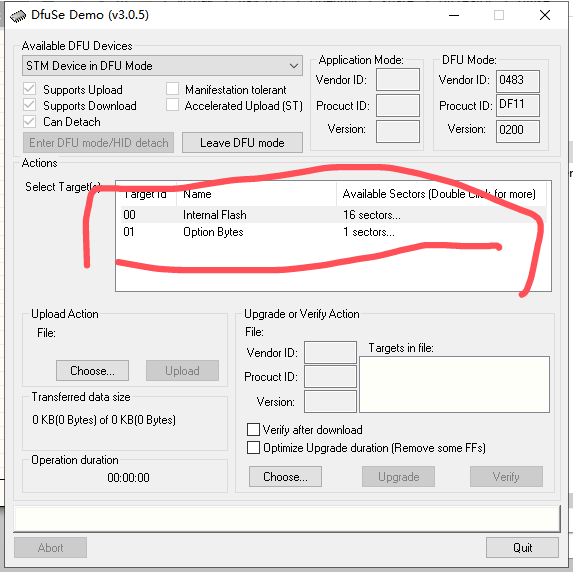
F
fvz4
@fvz4
0
声望
5
楼层
584
资料浏览
0
粉丝
0
关注
fvz4 发布的帖子
-
固件刷新问题,能否自己解决?发布在 OpenMV Cam
-
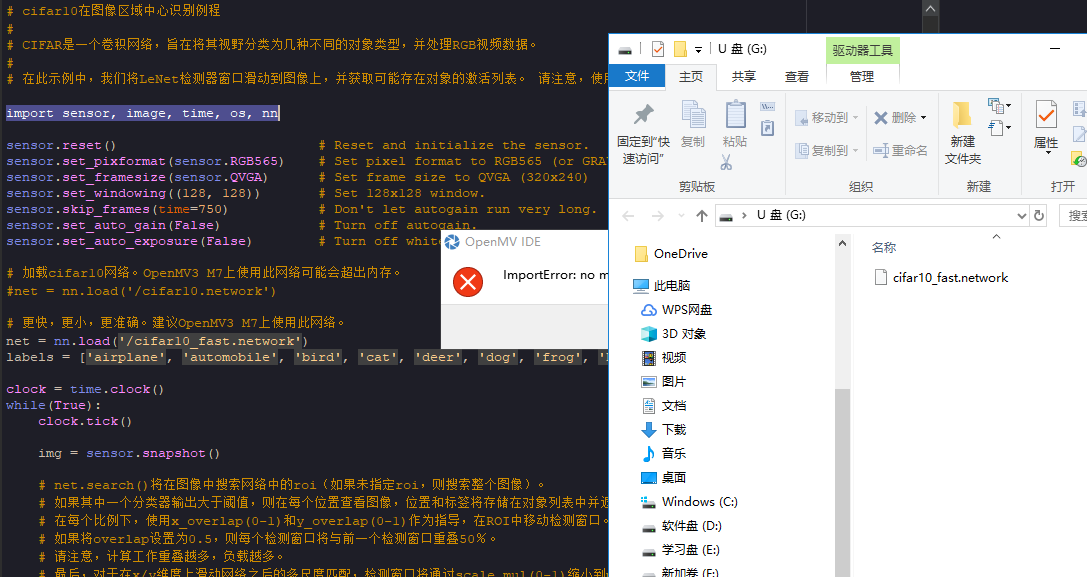
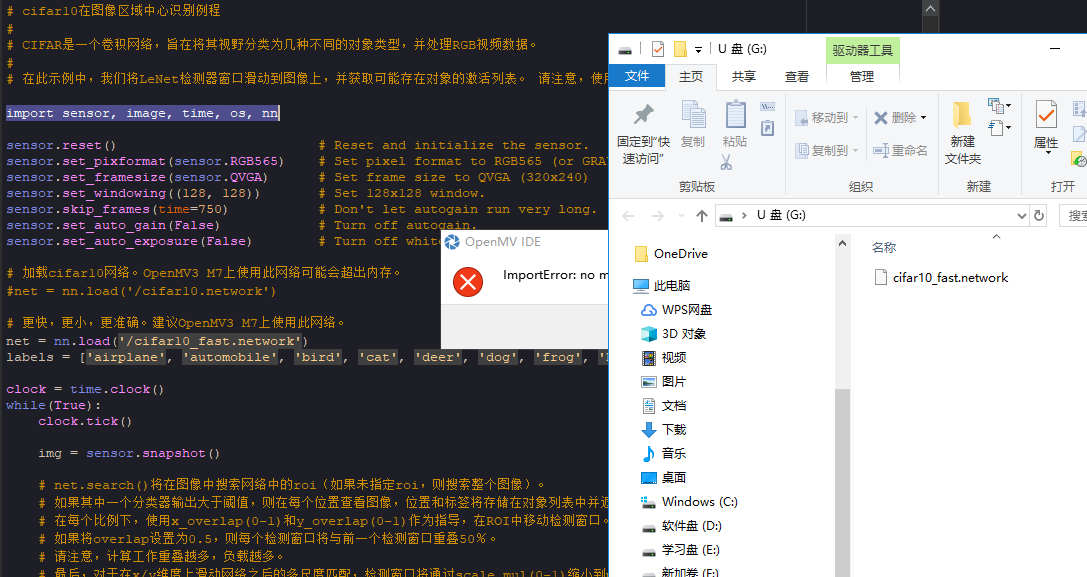
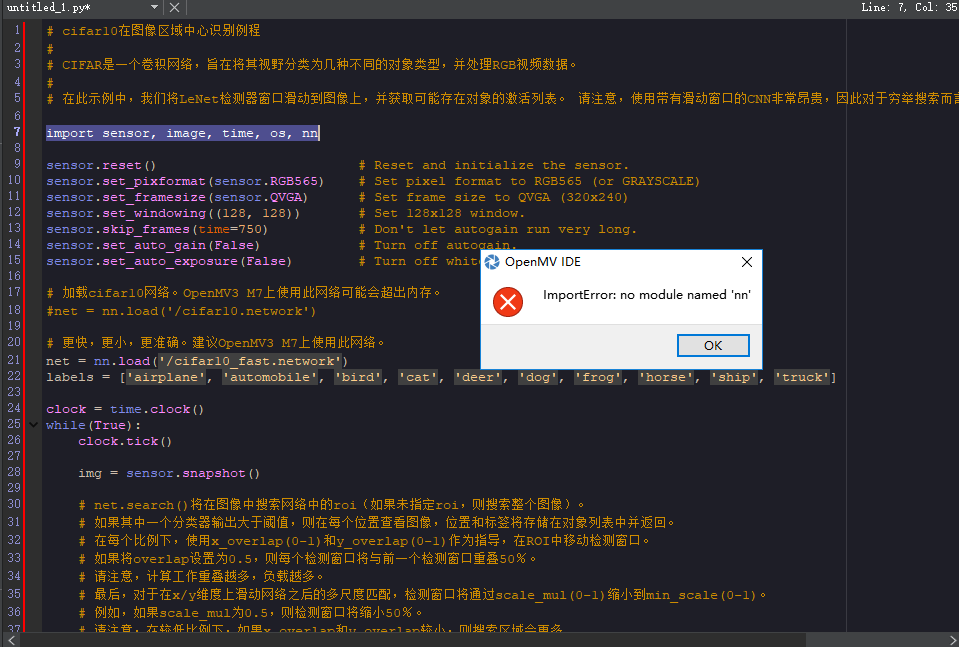
自己复制了一个神经网络代码报错了,怎么弄呀?发布在 OpenMV Cam
`# cifar10在图像区域中心识别例程
CIFAR是一个卷积网络,旨在将其视野分类为几种不同的对象类型,并处理RGB视频数据。
在此示例中,我们将LeNet检测器窗口滑动到图像上,并获取可能存在对象的激活列表。 请注意,使用带有滑动窗口的CNN非常昂贵,因此对于穷举搜索而言,不要期望CNN是实时的。
import sensor, image, time, os, nn
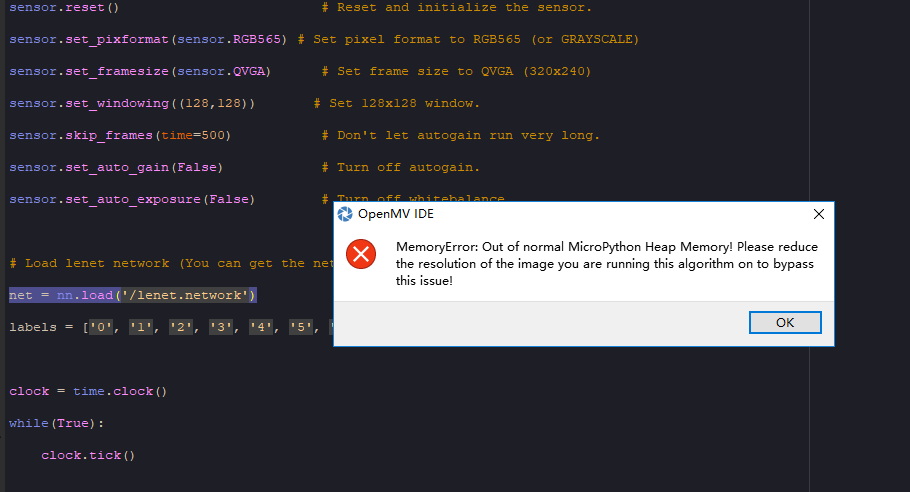
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_windowing((128, 128)) # Set 128x128 window.
sensor.skip_frames(time=750) # Don't let autogain run very long.
sensor.set_auto_gain(False) # Turn off autogain.
sensor.set_auto_exposure(False) # Turn off whitebalance.加载cifar10网络。OpenMV3 M7上使用此网络可能会超出内存。
#net = nn.load('/cifar10.network')
更快,更小,更准确。建议OpenMV3 M7上使用此网络。
net = nn.load('/cifar10_fast.network')
labels = ['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']clock = time.clock()
while(True):
clock.tick()img = sensor.snapshot() # net.search()将在图像中搜索网络中的roi(如果未指定roi,则搜索整个图像)。 # 如果其中一个分类器输出大于阈值,则在每个位置查看图像,位置和标签将存储在对象列表中并返回。 # 在每个比例下,使用x_overlap(0-1)和y_overlap(0-1)作为指导,在ROI中移动检测窗口。 # 如果将overlap设置为0.5,则每个检测窗口将与前一个检测窗口重叠50%。 # 请注意,计算工作重叠越多,负载越多。 # 最后,对于在x/y维度上滑动网络之后的多尺度匹配,检测窗口将通过scale_mul(0-1)缩小到min_scale(0-1)。 # 例如,如果scale_mul为0.5,则检测窗口将缩小50%。 # 请注意,在较低比例下,如果x_overlap和y_overlap较小,则搜索区域会更多... # contrast_threshold会跳过平坦区域。 # 设置x_overlap = -1会强制窗口始终保持在x方向的ROI中心。 # 如果y_overlap不为-1,则该方法将搜索所有垂直位置。 # 设置y_overlap = -1会强制窗口始终在y方向的ROI中居中。 # 如果x_overlap不是-1,则该方法将在所有水平位置搜索。 for obj in net.search(img, threshold=0.6, min_scale=0.4, scale_mul=0.8, \ x_overlap=-1, y_overlap=-1, contrast_threshold=0.5): print("Detected %s - Confidence %f%%" % (labels[obj.index()], obj.value())) img.draw_rectangle(obj.rect(), color=(255, 0, 0)) print(clock.fps())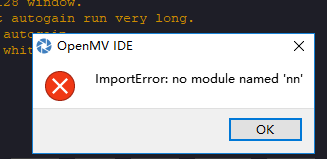 ``
``
请在这里粘贴代码