..........求助
fd2z 发布的帖子
-
有木有什么好方法分辨出红绿蓝白黑五种颜色发布在 OpenMV Cam
黑白色块分辨时,如果只有黑或只有白时色块识别并没有工作是为何呢
我红绿蓝用的是彩图色块识别,黑白用的是灰度
黑白时总是只能识别其中一种颜色import sensor,time import image,math from pyb import LED kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] redthresholds = (29, 99, 19, 127, -128, 127)# grayscale thresholds设置阈值 greenthresholds = (30, 100, -64, -8, -32, 32) bluethresholds = (19, 72, -128, 127, -128, -8) graythresholds = [(65, 128)] whitethresholds = (185, 255) blackthresholds = (0,20) roi=(60,40,40,40) red_color_code = 1 blue_color_code = 2 green_color_code = 3 sensor.reset() # 初始化 sensor. sensor.set_pixformat(sensor.RGB565) # or sensor.RGB565 sensor.set_framesize(sensor.QQVGA) # or sensor.QVGA (or others) sensor.skip_frames(10) # 让新的设置生效 sensor.set_windowing(roi) clock = time.clock() # 追踪FPS while(True): clock.tick() # Track elapsed milliseconds between snapshots(). image = sensor.snapshot() # Take a picture and return the image. blobs = image.find_blobs([redthresholds, greenthresholds, bluethresholds], area_threshold=100) if blobs: print(blobs) for blob in blobs: x = blob[0] y = blob[1] # width = blob[2] # 色块矩形的宽度 height = blob[3] # 色块矩形的高度 center_x = blob[5] # 色块中心点x值 center_y = blob[6] # 色块中心点y值 color_code = blob[8] if color_code == red_color_code: image.draw_rectangle(blob.rect()) #image.draw_rectangle(0, 0, 20, 20,color=greenthresholds,thickness=1,fill=False) image.draw_cross(center_x, center_y) output_str="[%d,%d]" % (blob.cx(),blob.cy()) #方式1 print(output_str) elif color_code == green_color_code: image.draw_rectangle(blob.rect()) image.draw_cross(center_x, center_y) output_str="[%d,%d]" % (blob.cx(),blob.cy()) #方式1 print(output_str) elif color_code == blue_color_code: image.draw_rectangle(blob.rect()) image.draw_cross(center_x, center_y) output_str="[%d,%d]" % (blob.cx(),blob.cy()) #方式1 print(output_str) else : img = sensor.snapshot() img.to_grayscale() img.binary(graythresholds) blob = img.find_blobs([whitethresholds], pixels_threshold=10, area_threshold=10, merge=True) if blob: print('4') else : print('5') -
RE: 程序里二次改变白平衡和自动增益有什么要注意的吗?发布在 OpenMV Cam
但是打开白平衡和自动增益扫十字效果(我的用法和色块识别类似)特别不好
THRESHOLD = [(0,100)] BINARY_VISIBLE = True import sensor, image, time, math, utime from pyb import UART from pyb import LED import json roi=(0,60,160,60) roi_1 = [(20, 0, 120, 20), # 北 (20, 100, 120, 20), # 南 (0, 0, 20, 120), # 西 (140, 0, 20, 120), # 东 (60,40,40,40)] # 中 #LED(1).on() #LED(2).on() #LED(3).on() sensor.reset() sensor.set_vflip(False) sensor.set_hmirror(False) sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QQVGA) sensor.set_auto_whitebal(False) # turn this off. sensor.set_auto_gain(False) sensor.skip_frames(time = 2000) clock = time.clock() buf =[0 for i in range(5)] low_threshold = (0, 40 ) uart = UART(3, 115200) while(True): m = -1 isten = 0 #img = sensor.snapshot() sensor.set_auto_whitebal(False) # turn this off. sensor.set_auto_gain(False) utime.sleep_us(90) img = sensor.snapshot().lens_corr(strength = 1.8, zoom = 1.0) img.binary([low_threshold],invert = 1) for r in roi_1: m += 1 blobs = img.find_blobs(THRESHOLD, roi=r[0:4],pixels_threshold=100, area_threshold=100, merge=True) #img.draw_rectangle(r[0:4], color=(255,0,0)) if blobs: most_pixels = 0 largest_blob = 0 for i in range(len(blobs)): #目标区域找到的颜色块(线段块)可能不止一个,找到最大的一个,作为本区域内的目标直线 if blobs[i].pixels() > most_pixels: most_pixels = blobs[i].pixels() #merged_blobs[i][4]是这个颜色块的像素总数,如果此颜色块像素总数大于 largest_blob = i # Draw a rect around the blob. img.draw_rectangle(blobs[largest_blob].rect()) #将此区域的像素数最大的颜色块画矩形和十字形标记出来 img.draw_cross(blobs[largest_blob].cx(), blobs[largest_blob].cy()) buf[m] = 1 else: buf[m] = 0 utime.sleep_us(90) sensor.set_auto_whitebal(True) # turn this off. sensor.set_auto_gain(True) utime.sleep_us(90) clock.tick() img = sensor.snapshot().binary(THRESHOLD) if BINARY_VISIBLE else sensor.snapshot() line = img.get_regression([(255,255) if BINARY_VISIBLE else THRESHOLD],roi=(0,60,160,60)) if (line): rho_err = abs(line.rho())-img.width()//2+256 img.draw_line(line.line(), color = 127) print("theta %f, rho = %f " % (line.theta(), line.rho()) if (line) else "N/A") output_str="%d" %rho_err print(output_str) if buf[0]==1 and buf[1] ==1 and buf[2] ==1 and buf[3] ==1 and buf[4] ==1: isten = 1 print(isten) out_str="[%d" %isten uart.write(out_str ) -
程序里二次改变白平衡和自动增益有什么要注意的吗?发布在 OpenMV Cam
我的颜色识别和二值化巡线算法的白平衡和自动增益设置是相反的
这两算法单独时都能用但是放在一起总是不能完美使用
我就是在while(true)里两次设置白平衡和自动增益
但是画面会屏闪,前一帧的画面很正常,下一帧的画面就。。。不正常 -
如何巡线又清楚的识别出十字路口发布在 OpenMV Cam
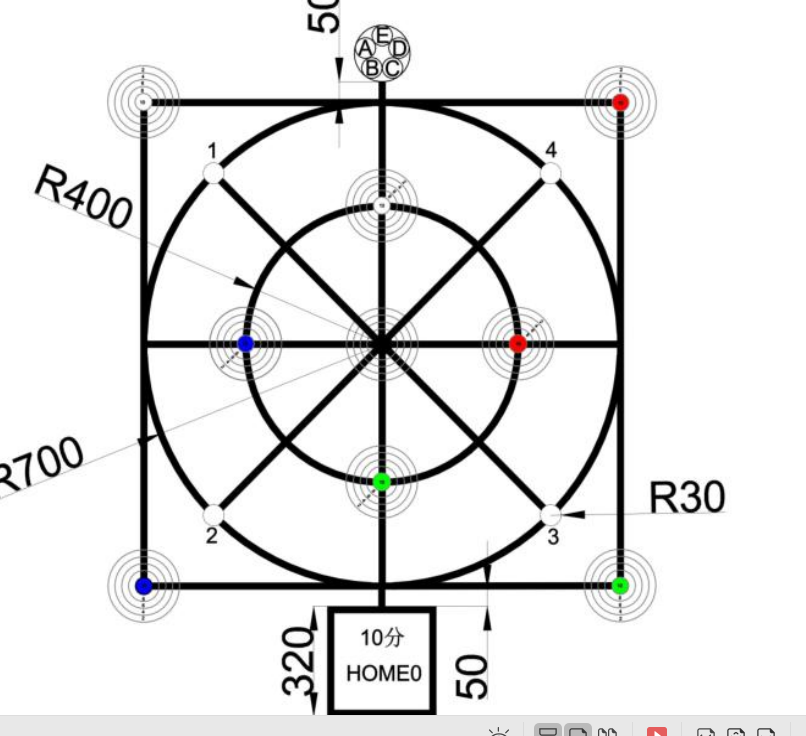
THRESHOLD = [(0,100)] BINARY_VISIBLE = True import sensor, image, time, math, utime from pyb import UART from pyb import LED import json roi=(0,60,160,60) roi_1 = [(20, 0, 120, 20), # 北 (20, 100, 120, 20), # 南 (0, 0, 20, 120), # 西 (140, 0, 20, 120), # 东 (60,40,40,40)] # 中 #LED(1).on() #LED(2).on() #LED(3).on() sensor.reset() sensor.set_vflip(False) sensor.set_hmirror(False) sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QQVGA) sensor.set_auto_whitebal(False) # turn this off. sensor.set_auto_gain(False) sensor.skip_frames(time = 2000) clock = time.clock() buf =[0 for i in range(5)] low_threshold = (0, 40 ) uart = UART(3, 115200) while(True): m = -1 isten = 0 #img = sensor.snapshot() sensor.set_auto_whitebal(False) # turn this off. sensor.set_auto_gain(False) utime.sleep_us(90) img = sensor.snapshot().lens_corr(strength = 1.8, zoom = 1.0) img.binary([low_threshold],invert = 1) for r in roi_1: m += 1 blobs = img.find_blobs(THRESHOLD, roi=r[0:4],pixels_threshold=100, area_threshold=100, merge=True) #img.draw_rectangle(r[0:4], color=(255,0,0)) if blobs: most_pixels = 0 largest_blob = 0 for i in range(len(blobs)): #目标区域找到的颜色块(线段块)可能不止一个,找到最大的一个,作为本区域内的目标直线 if blobs[i].pixels() > most_pixels: most_pixels = blobs[i].pixels() #merged_blobs[i][4]是这个颜色块的像素总数,如果此颜色块像素总数大于 largest_blob = i # Draw a rect around the blob. img.draw_rectangle(blobs[largest_blob].rect()) #将此区域的像素数最大的颜色块画矩形和十字形标记出来 img.draw_cross(blobs[largest_blob].cx(), blobs[largest_blob].cy()) buf[m] = 1 else: buf[m] = 0 utime.sleep_us(90) sensor.set_auto_whitebal(True) # turn this off. sensor.set_auto_gain(True) utime.sleep_us(90) clock.tick() img = sensor.snapshot().binary(THRESHOLD) if BINARY_VISIBLE else sensor.snapshot() line = img.get_regression([(255,255) if BINARY_VISIBLE else THRESHOLD],roi=(0,60,160,60)) if (line): rho_err = abs(line.rho())-img.width()//2+256 img.draw_line(line.line(), color = 127) print("theta %f, rho = %f " % (line.theta(), line.rho()) if (line) else "N/A") output_str="%d" %rho_err print(output_str) if buf[0]==1 and buf[1] ==1 and buf[2] ==1 and buf[3] ==1 and buf[4] ==1: isten = 1 print(isten) out_str="[%d" %isten uart.write(out_str )这是我的代码



 任务是将1位置有白色物块放在中间的白色圈内!
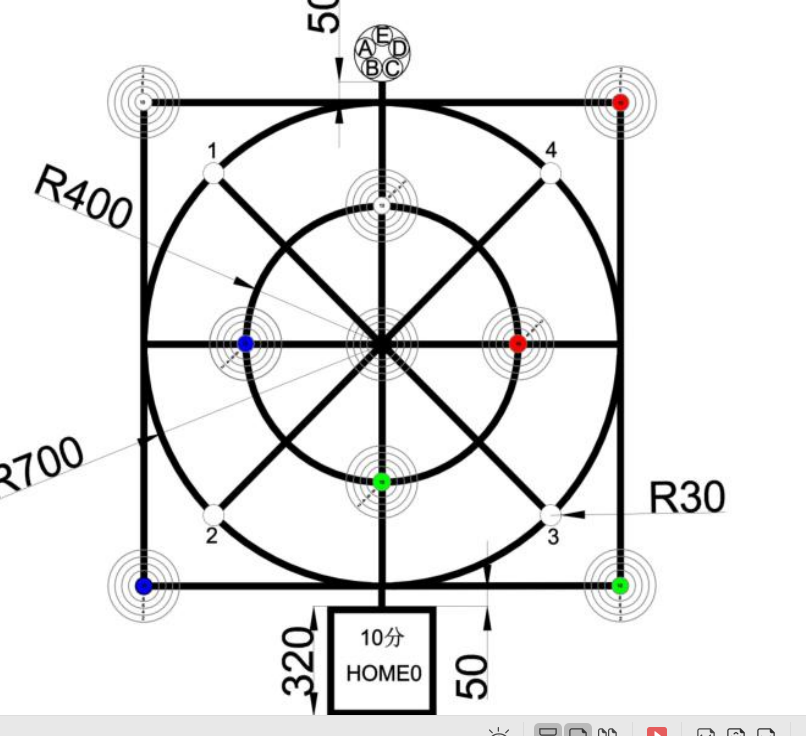
任务是将1位置有白色物块放在中间的白色圈内!