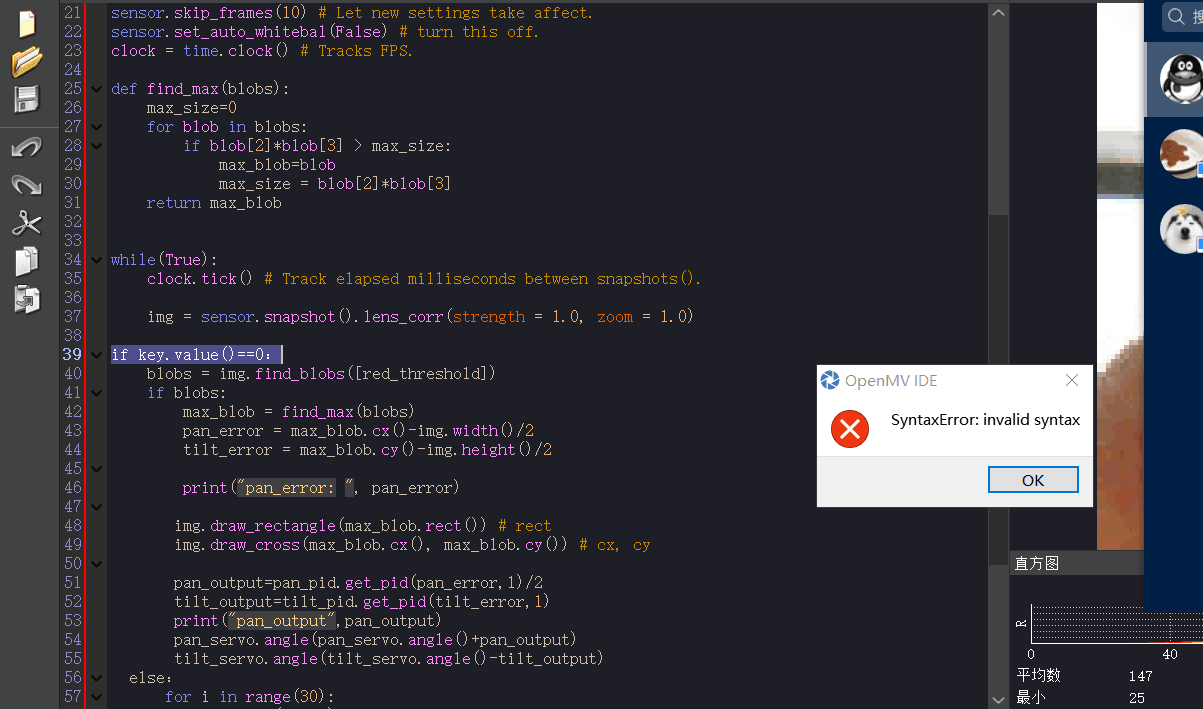
请教各位大佬帮忙看看是哪里出了问题,我的程序是由舵机云台的红色追踪与舵机云台的自动转动,单独使用都可以运行,但是我加了一个按键(有上拉电阻)后,将两个程序合在一块就没有成功了,所以请教各位大佬帮忙看看问题合在???
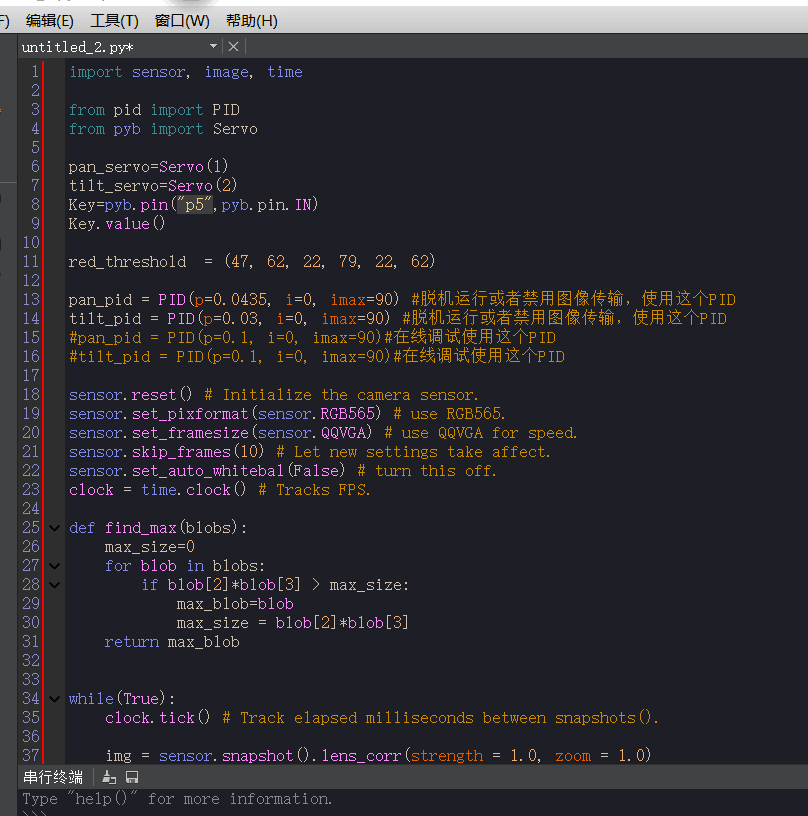
import sensor, image, time
from pid import PID
from pyb import Servo
pan_servo=Servo(1)
tilt_servo=Servo(2)
Key=pyb.pin("p5",pyb.pin.IN)
Key.value()
red_threshold = (47, 62, 22, 79, 22, 62)
pan_pid = PID(p=0.0435, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID
tilt_pid = PID(p=0.03, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID
#pan_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID
#tilt_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
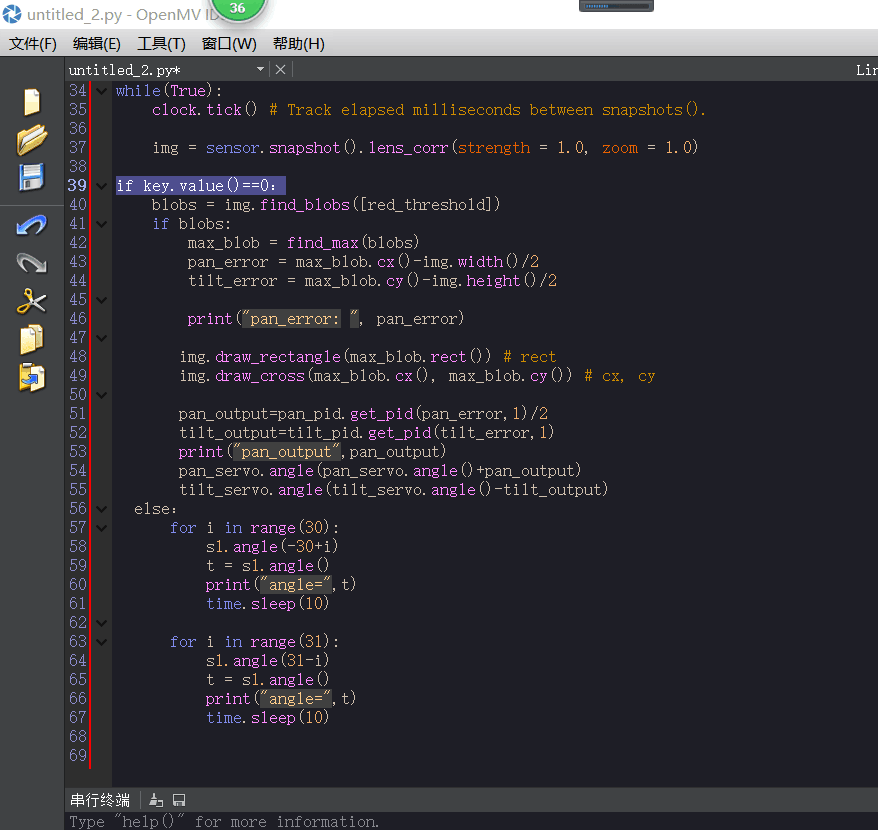
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot().lens_corr(strength = 1.0, zoom = 1.0)
if Key.value()==0:
blobs = img.find_blobs([red_threshold])
if blobs:
max_blob = find_max(blobs)
pan_error = max_blob.cx()-img.width()/2
tilt_error = max_blob.cy()-img.height()/2
print("pan_error: ", pan_error)
img.draw_rectangle(max_blob.rect()) # rect
img.draw_cross(max_blob.cx(), max_blob.cy()) # cx, cy
pan_output=pan_pid.get_pid(pan_error,1)/2
tilt_output=tilt_pid.get_pid(tilt_error,1)
print("pan_output",pan_output)
pan_servo.angle(pan_servo.angle()+pan_output)
tilt_servo.angle(tilt_servo.angle()-tilt_output)
else:
for i in range(30):
s1.angle(-30+i)
t = s1.angle()
print("angle=",t)
time.sleep(10)
for i in range(31):
s1.angle(31-i)
t = s1.angle()
print("angle=",t)
time.sleep(10)