# TensorFlow Lite 目标点检测示例
#
# 本例程使用内置的FOMO模型检测人脸。
import sensor
import time
import tf
import math
sensor.reset() # 重置并初始化感光元件
sensor.set_pixformat(sensor.RGB565) # 设置图像格式为 RGB565 (或 GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # 设置图像大小为 QVGA (320x240)
sensor.set_windowing((240, 240)) # 设置图像为 240x240 窗口大小
sensor.skip_frames(time=2000) # 跳过几帧使设置生效
min_confidence = 0.4
# 加载内置的 FOMO 人脸检测模型
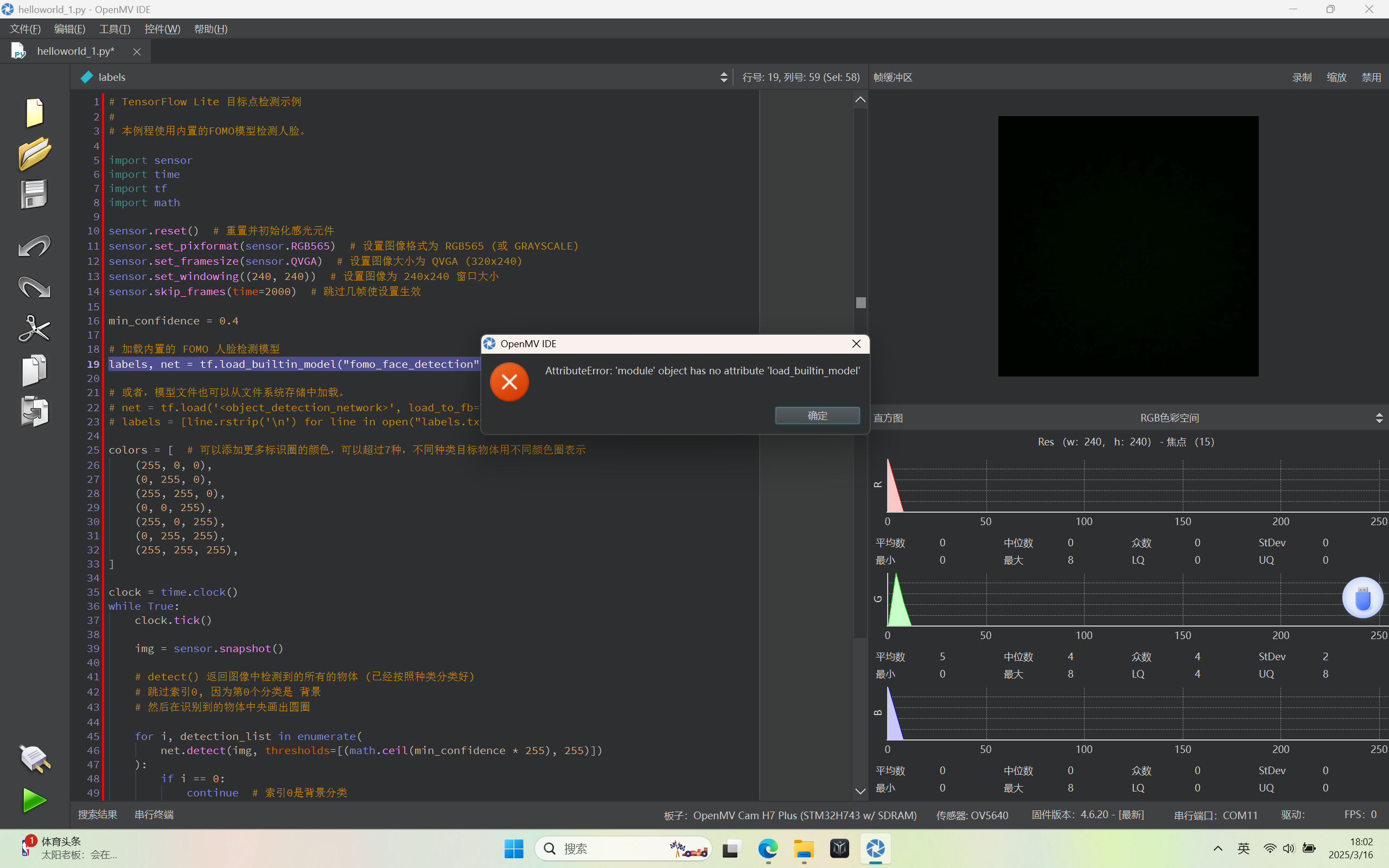
labels, net = tf.load_builtin_model("fomo_face_detection")
# 或者,模型文件也可以从文件系统存储中加载。
# net = tf.load('<object_detection_network>', load_to_fb=True)
# labels = [line.rstrip('\n') for line in open("labels.txt")]
colors = [ # 可以添加更多标识圈的颜色,可以超过7种,不同种类目标物体用不同颜色圈表示
(255, 0, 0),
(0, 255, 0),
(255, 255, 0),
(0, 0, 255),
(255, 0, 255),
(0, 255, 255),
(255, 255, 255),
]
clock = time.clock()
while True:
clock.tick()
img = sensor.snapshot()
# detect() 返回图像中检测到的所有的物体 (已经按照种类分类好)
# 跳过索引0, 因为第0个分类是 背景
# 然后在识别到的物体中央画出圆圈
for i, detection_list in enumerate(
net.detect(img, thresholds=[(math.ceil(min_confidence * 255), 255)])
):
if i == 0:
continue # 索引0是背景分类
if len(detection_list) == 0:
continue # 没有检测到这个种类的物体
print("********** %s **********" % labels[i])
for d in detection_list:
[x, y, w, h] = d.rect()
center_x = math.floor(x + (w / 2))
center_y = math.floor(y + (h / 2))
print(f"x {center_x}\ty {center_y}")
img.draw_circle((center_x, center_y, 12), color=colors[i], thickness=2)
print(clock.fps(), "fps", end="\n")