串口的函数写错了 但是我改回来了 还是不行 还是一样的错误
C
cg26
@cg26
0
声望
3
楼层
433
资料浏览
0
粉丝
0
关注
cg26 发布的帖子
-
多颜色识别 串口发送数据 颜色识别成功 发送的时候错误发布在 OpenMV Cam
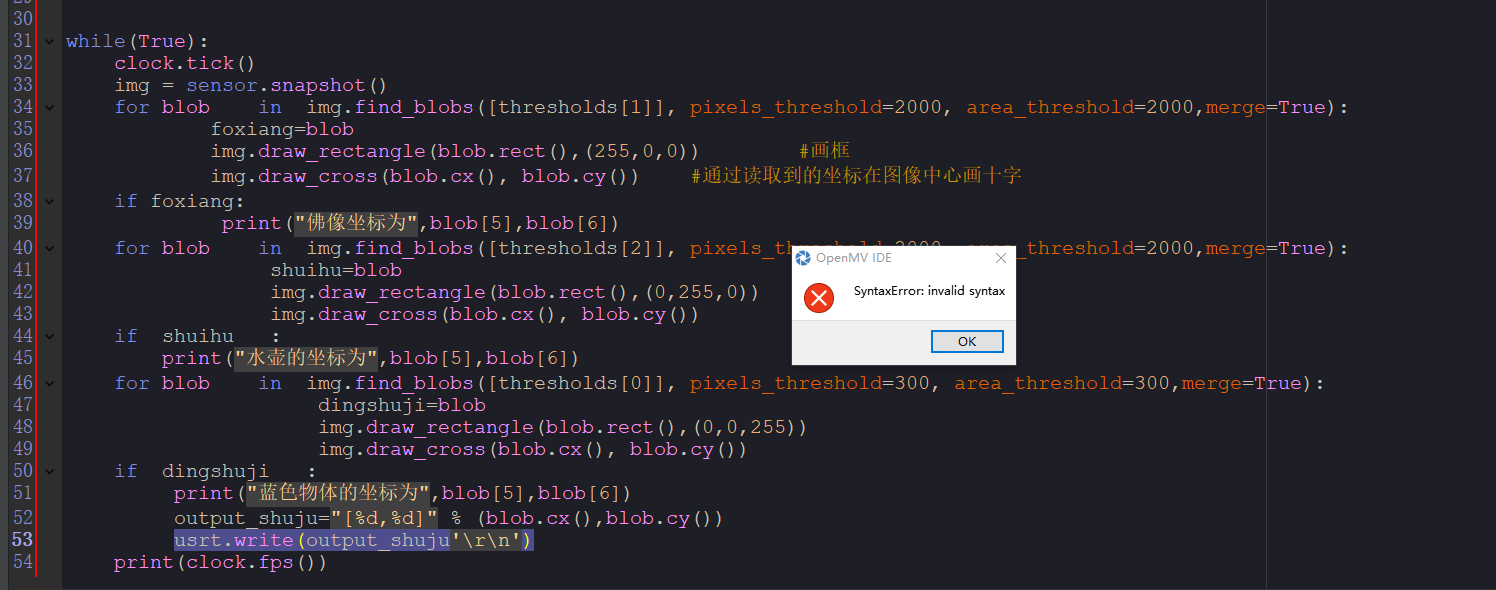
我已经崩溃了 # Single Color RGB565 Blob Tracking Example # # This example shows off single color RGB565 tracking using the OpenMV Cam. import sensor, image, time, math from pyb import UART threshold_index = 0 # 0 for red, 1 for green, 2 for blue foxiang=0 shuihu=0 dingshuji=0 output_shuju=0 # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green/blue things. You may wish to tune them... thresholds = [(100, 10, 127, -128, -33, -128), # 订书机 (34, 58, -128, 127, 32, 127), # 佛像阈值 (7, 58, 15, 38, -30, 11)] #紫色水壶阈值 uart = UART(3, 115200) sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() while(True): clock.tick() img = sensor.snapshot() for blob in img.find_blobs([thresholds[1]], pixels_threshold=2000, area_threshold=2000,merge=True): foxiang=blob img.draw_rectangle(blob.rect(),(255,0,0)) #画框 img.draw_cross(blob.cx(), blob.cy()) #通过读取到的坐标在图像中心画十字 if foxiang: print("佛像坐标为",blob[5],blob[6]) for blob in img.find_blobs([thresholds[2]], pixels_threshold=2000, area_threshold=2000,merge=True): shuihu=blob img.draw_rectangle(blob.rect(),(0,255,0)) img.draw_cross(blob.cx(), blob.cy()) if shuihu : print("水壶的坐标为",blob[5],blob[6]) for blob in img.find_blobs([thresholds[0]], pixels_threshold=300, area_threshold=300,merge=True): dingshuji=blob img.draw_rectangle(blob.rect(),(0,0,255)) img.draw_cross(blob.cx(), blob.cy()) if dingshuji : print("蓝色物体的坐标为",blob[5],blob[6]) output_shuju="[%d,%d]" % (blob.cx(),blob.cy()) usrt.write(output_shuju'\r\n') print(clock.fps())里粘贴 -
颜色识别 索引问题 超出索引发布在 OpenMV Cam

为什么我这样索引会有错误呢?我已经赋值给他了 不是应该跟blob的数值相等吗?
threshold_index = 0 # 0 for red, 1 for green, 2 for blue foxiang=0 shuihu=0 dingshuji=0 # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green/blue things. You may wish to tune them... thresholds = [(100, 20, -122, 127, -128, 127), # 黑色阈值 (34, 58, -128, 127, 32, 127), # 佛像阈值 (7, 58, 15, 38, -30, 11)] #紫色水壶阈值 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() while(True): clock.tick() img = sensor.snapshot() foxiang=img.find_blobs([thresholds[1]]) if foxiang: print("坐标为",foxiang[5]) print(clock.fps())