论文需要说明为什么要选用舵机,求指导
B
bp6z 发布的帖子
-
如何用openmv准确的识别颜色呢?发布在 OpenMV Cam
我用了例程中的红色阈值,但是这个范围识别的范围太广了,皮肤的颜色也会被识别为红色,而且用ide里的阈值编辑器效果也一样,如何才能比较精准的识别颜色呢?
-
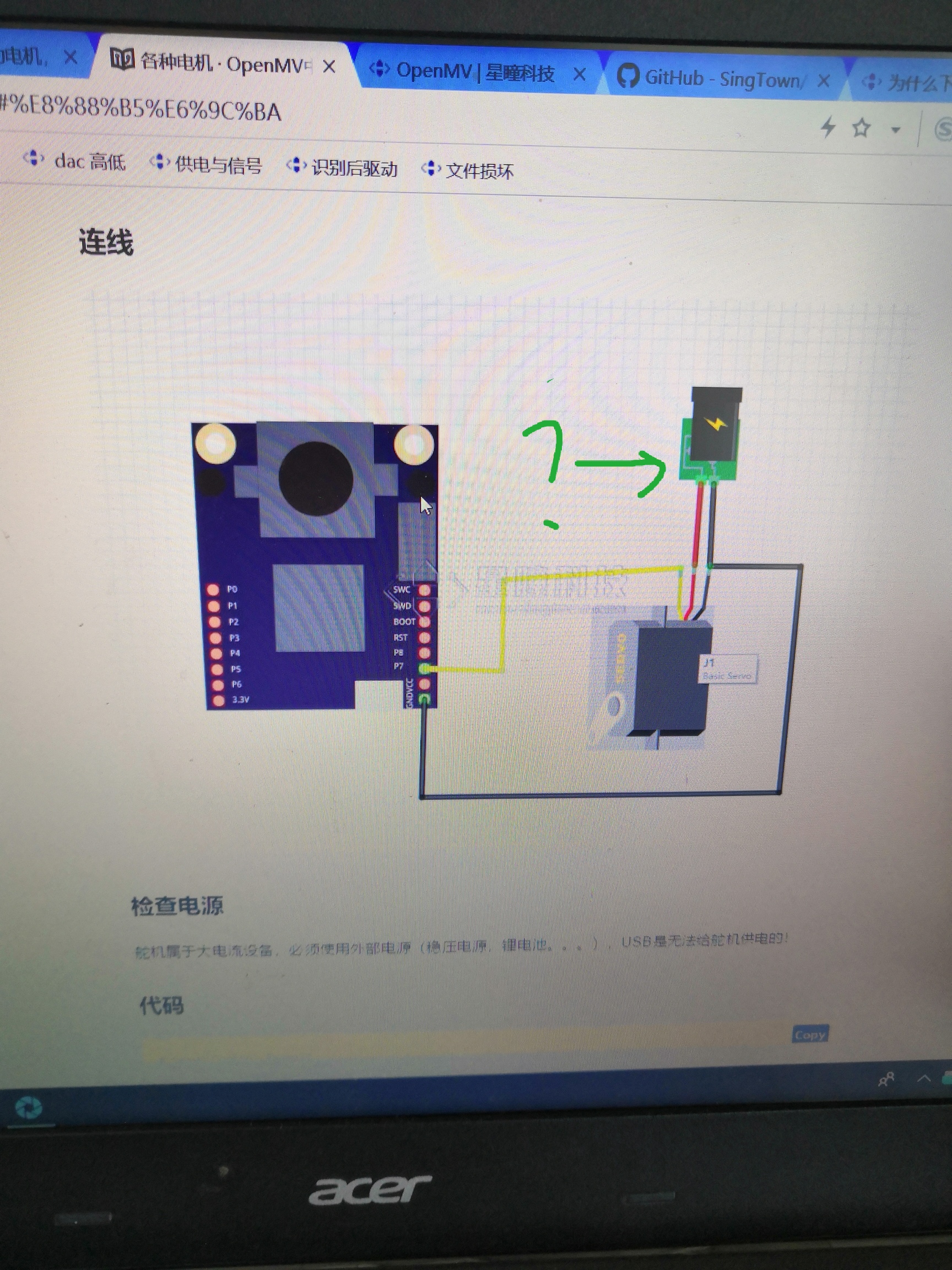
RE: 为什么在ide里运行不了此程序呢?(外设舵机的线都已经接好了)发布在 OpenMV Cam
@kidswong999 如果线的连接和供电都没有问题,但是程序里没有死循环,舵机会被驱动吗?会不会因为程序执行太快导致没法看清舵机被驱动呢?
-
RE: 如何编程能控制舵机从图一转动到图二呢?发布在 OpenMV Cam
from pyb import Servo
s1 = Servo(1)
s1.angle(0)
s1.angle(90)
这个和您写的是一个意思吧,但还是行不通呢?线连的也没问题啊,但运行不了 -
RE: 为什么在ide里运行不了此程序呢?(外设舵机的线都已经接好了)发布在 OpenMV Cam
正常情况下点一下那个左下角绿色的小三角变成红叉就说明该脚本正在运行,但这个程序点绿色小三角形怎么也变不成红叉,这是什么情况呢?
-
为什么在ide里运行不了此程序呢?(外设舵机的线都已经接好了)发布在 OpenMV Cam
from pyb import Servo
s1 = Servo(1)
s1.angle(90)
点运行程序的键也没有反应。 -
救急,我编了一个识别绿色后驱动电机轴转90度的程序,但不知道哪里出了问题。程序如下,连接图也在下面。发布在 OpenMV Cam
import sensor, image, time
from pyb import Servo
s1 = Servo(1)red_threshold = (30, 100, -64, -8, -32, 32)
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blobwhile(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.blobs = img.find_blobs([red_threshold]) if blobs: max_blob = find_max(blobs) img.draw_rectangle(max_blob.rect()) # rect img.draw_cross(max_blob.cx(), max_blob.cy()) # cx, cy s1.angle(90)
-
请问这个程序可以控制电机轴转的角度吗?发布在 OpenMV Cam
from pyb import Servo
s1 = Servo(1) # servo on position 1 (P7) 位置1的servo(P7)
s1.angle(45) # move to 45 degrees 移动到45度
s1.angle(-60, 1500) # move to -60 degrees in 1500ms 在1500ms内移动到-60度
s1.speed(50) # for continuous rotation servos 连续旋转舵机
 图一
图一  图二
图二