比如百度搜索北京时间,用摄像头对着时间。时间是在不停的变化,能打印出变化的位置坐标。
B
bmhg
@bmhg
0
声望
5
楼层
641
资料浏览
0
粉丝
0
关注
bmhg 发布的帖子
-
之前串口没有问题,今天串口上传数据乱码。会不会是硬件问题发布在 OpenMV Cam
Single Color RGB565 Blob Tracking Example
This example shows off single color RGB565 tracking using the OpenMV Cam.
import sensor, image, time, math
from pyb import UART
threshold_index = 0 # 0 for red, 1 for green, 2 for blue QVGA320
thresholds = [(100, 100, 0, 3, 3, 0), # generic_red_thresholds
(255,255), # generic_green_thresholds 30,255
(0, 30, 0, 64, -128, 0)] # generic_blue_thresholds RGB565 GRAYSCALEsensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE) #sensor.GRAYSCALE
sensor.set_framesize(sensor.VGA) #sensor.VGA
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock()
uart = UART(3,57600)
mx=0
my=0
while(True):
clock.tick()
img = sensor.snapshot()
for blob in img.find_blobs([thresholds[1]], pixels_threshold=10, area_threshold=10, merge=True):if blob.cx() > 100 : img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) #str(blob.cx())+','+str(blob.cy()) uart.write('{'+str(blob.cx())+','+str(blob.cy())+'}') print('{'+str(blob.cx())+','+str(blob.cy())+'}') #uart.write(str(blob.cx())+','+str(blob.cy())+';')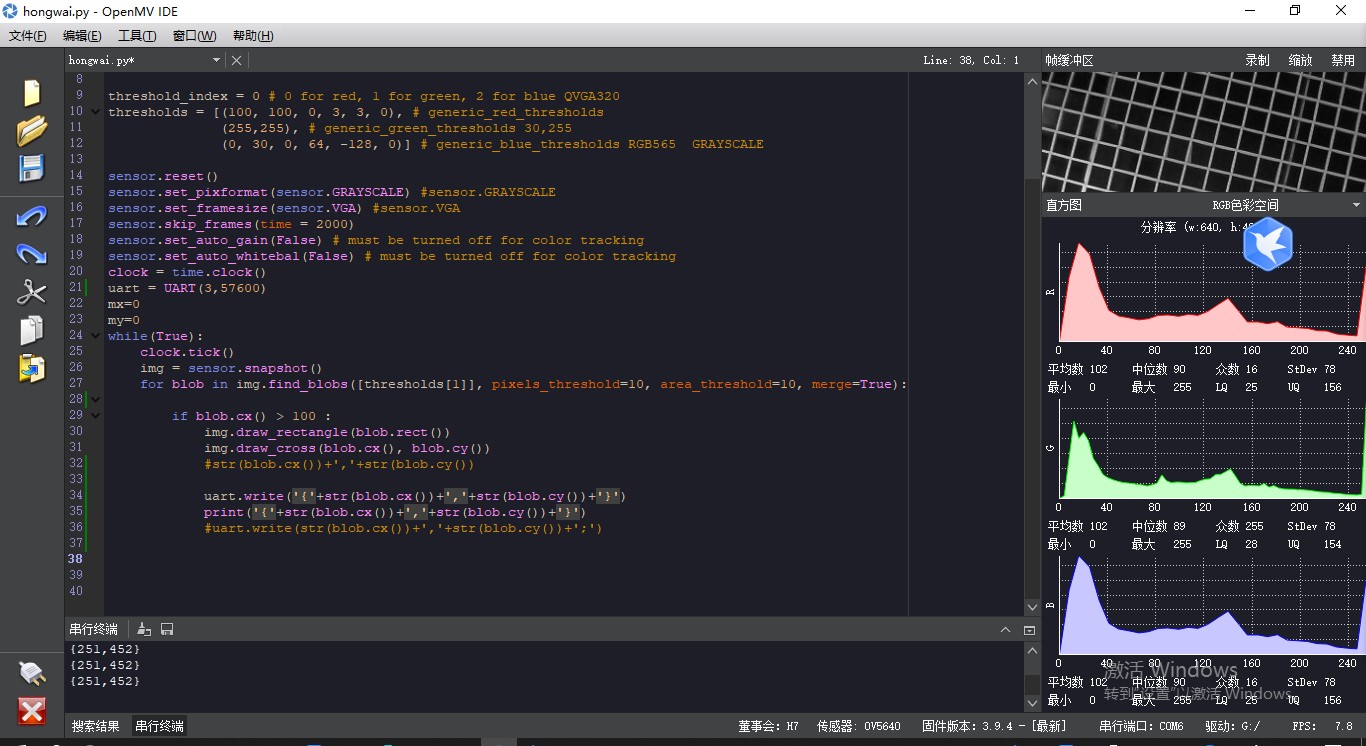

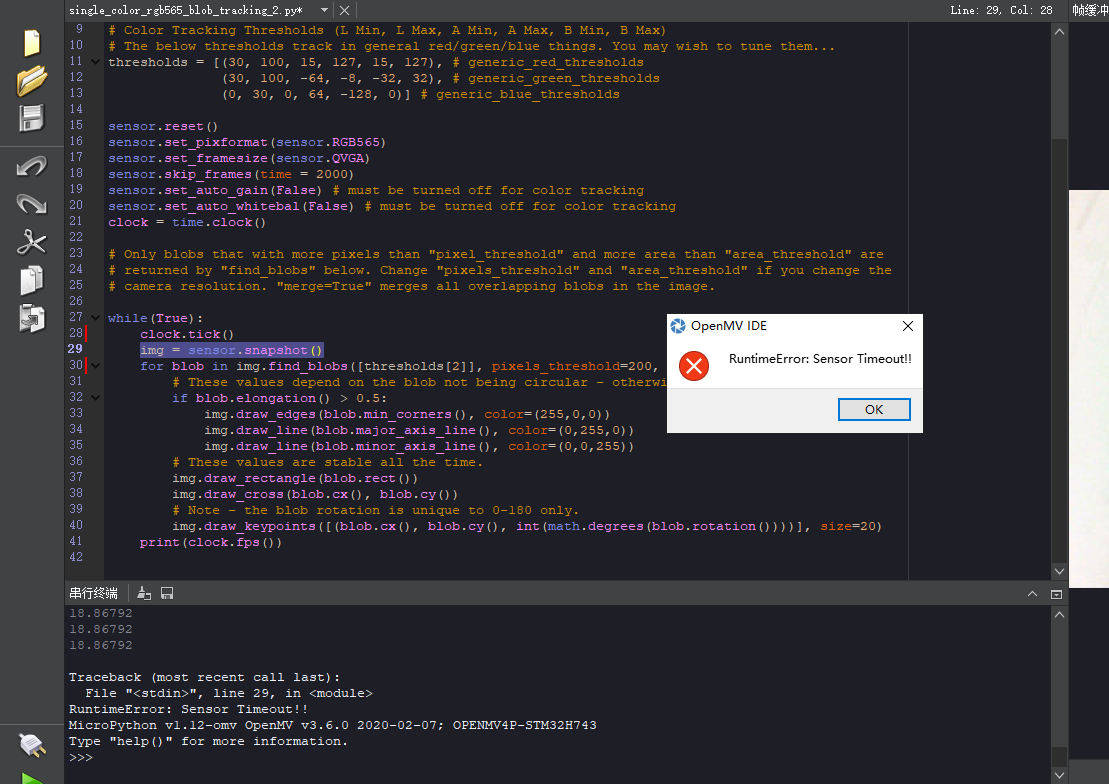 打开的实例代码运行的报错。
打开的实例代码运行的报错。