现在的思路是用openmv识别出所有的绿色和红色色块的坐标后,将坐标传给arduino,将物体移至某一位置,不知道是否可行?请问还需要什么学习什么内容?
B
bick 发布的帖子
-
请问可以用openmv实现不同颜色分拣的功能吗?发布在 OpenMV Cam
-
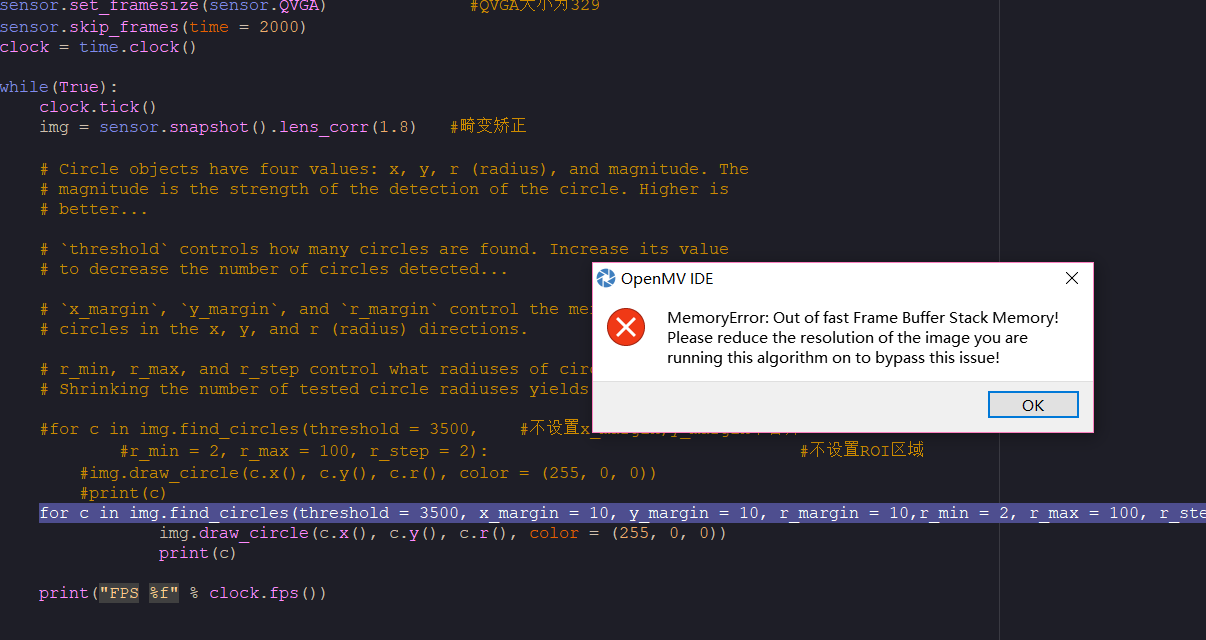
使用定时器如何实现隔一段时间与Arduino通信的功能?程序提示memory error的原因?发布在 OpenMV Cam
def set_outstr(timer): out_str ='[' out_str +='(%d,%d)' %(x_error,y_error) out_str +=']' uart.write(out_str) #向arduino传递out_str字符串 print (out_str) while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([green_threshold]) tim=Timer(4,freq=5) if blobs: max_blob = find_max(blobs) x_error = max_blob[5]-img.width()/2 #X方向偏差 y_error = max_blob[6]-img.height()/2 #y方向偏差 print("x error: ", x_error) print("y_error: ", y_error) img.draw_rectangle(max_blob[0:4]) # rect img.draw_cross(max_blob[5], max_blob[6]) # cx, cy tim.callback(set_outstr)提示错误:uncaught exception in Timer(4) interrupt handler
MemoryError:
x error: -119.0
y_error: -21.0 -
RE: 请问怎样得到画面中心坐标啊?发布在 OpenMV Cam
img.draw_cross(int(img.width()/2),int(img.height()/2))转换为整型之后就可以了
-
RE: 请问颜色形状同时识别时可以只返回某一帧图像的大信息吗?发布在 OpenMV Cam
@kidswong999 我想把检测到的圆心和半径传给Arduino,但是它每次发送这么多的数据,Arduino无法处理吧
-
RE: 请问颜色形状同时识别时可以只返回某一帧图像的大信息吗?发布在 OpenMV Cam
import sensor, image, time Thresholds = [(40, 74, 74, 18, -31, 42), #修改后红色的阈值 (84, 94, -57, -22, -27, 40)] # 修改后的绿色的阈值 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) #使用QVGA sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) ROI=(20,15,256,192) #for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10, #r_min = 2, r_max = 100, r_step = 2): for c in img.find_circles(roi=ROI,threshold = 6000, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 10, r_max = 30, r_step = 2): #修改后识别圆形的参数 area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r()) #area为识别到的圆的区域,即圆的外接矩形框 statistics = img.get_statistics(thresholds=Thresholds,roi=area) #像素颜色统计, #print(statistics) #不输出颜色的参数 #(0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。 #l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 0<statistics.l_mode()<100 and 0<statistics.a_mode()<74 and -31<statistics.b_mode()<42:#if the circle is red img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0))#识别到的红色圆形用红色的圆框出来 red_strs=[c[0],c[1],c[2]] #for index in range(len(c)): #print c[index] #for red_str in red_strs: #print ('red_str:',red_str) print (red_strs) print (c) elif 30<statistics.l_mode()<100 and -64<statistics.a_mode()<-8 and -32<statistics.b_mode()<32: #识别绿色的圆 img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0))#识别到的绿色圆形用红色的圆框出来 else: #识别红色或绿色 img.draw_rectangle(area, color = (255, 255, 255)) #将非红色的圆用白色的矩形框出来 #print("FPS %f" % clock.fps())