@kidswong999 咋不回消息嘞
B
bagv
@bagv
0
声望
8
楼层
223
资料浏览
0
粉丝
0
关注
bagv 发布的帖子
-
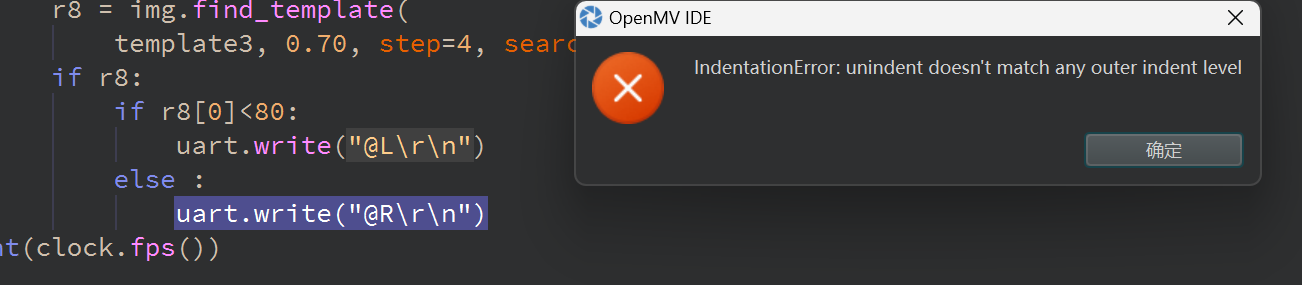
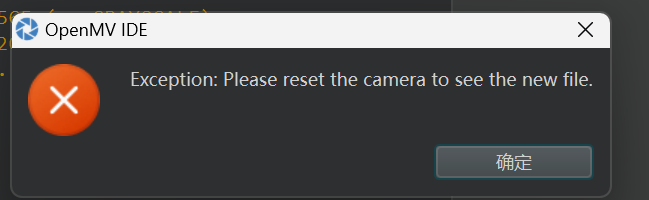
RE: 这里缩进为什么会有问题发布在 OpenMV Cam
# This work is licensed under the MIT license. # Copyright (c) 2013-2023 OpenMV LLC. All rights reserved. # https://github.com/openmv/openmv/blob/master/LICENSE # # Template Matching Example - Normalized Cross Correlation (NCC) # # This example shows off how to use the NCC feature of your OpenMV Cam to match # image patches to parts of an image... expect for extremely controlled environments # NCC is not all to useful. # # WARNING: NCC supports needs to be reworked! As of right now this feature needs # a lot of work to be made into somethin useful. This script will remain to show # that the functionality exists, but, in its current state is inadequate. import time import sensor import image from image import SEARCH_EX from pyb import UART # from image import SEARCH_DS uart=UART(3,9600) # Reset sensor sensor.reset() # Set sensor settings sensor.set_contrast(1) sensor.set_gainceiling(16) # Max resolution for template matching with SEARCH_EX is QQVGA sensor.set_framesize(sensor.QQVGA) # You can set windowing to reduce the search image. # sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60)) sensor.set_pixformat(sensor.GRAYSCALE) # Load template. # Template should be a small (eg. 32x32 pixels) grayscale image. template1 = image.Image("/1.pgm") template2 = image.Image("/2.pgm") template3 = image.Image("/3.pgm") template4 = image.Image("/4.pgm") template5 = image.Image("/5.pgm") template6 = image.Image("/6.pgm") template7 = image.Image("/7.pgm") template8 = image.Image("/8.pgm") clock = time.clock() # Run template matching while True: clock.tick() img = sensor.snapshot() num=0 # find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. r1 = img.find_template( template1, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r1: img.draw_rectangle(r1) num=1 r2 = img.find_template( template2, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r2: img.draw_rectangle(r2) num=2 r3 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r3: img.draw_rectangle(r3) num=3 r4 = img.find_template( template4, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r4: img.draw_rectangle(r) num=4 r5 = img.find_template( template5, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r5: img.draw_rectangle(r5) num=5 r6 = img.find_template( template6, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r6: img.draw_rectangle(r6) num=6 r7 = img.find_template( template7, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r7: img.draw_rectangle(r7) num=7 r8 = img.find_template( template8, 0.70, step=4, search=SEARCH_EX ) # , roi=(10, 0, 60, 60)) if r8: img.draw_rectangle(r8) num=8 print(clock.fps()) if num!=0 : while True: clock.tick() img=sensor.snapshot() if num==1: print("1") uart.write("@L\r\n") if num==2: print("2") uart.write("@R\r\n") if num==3: r3 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) if r3: if r3[0]<80: uart.write("@L\r\n") else: uart.write("@R\r\n") if num==4: r4 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) if r4: if r4[0]<80: uart.write("@L\r\n") else : uart.write("@R\r\n") if num==5: r5 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) if r5: if r3[0]<80: uart.write("@L\r\n") else: uart.write("@R\r\n") if num==6: r6 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) if r6: if r6[0]<80: uart.write("@L\r\n") else : uart.write("@R\r\n") if num==7: r7 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) if r7: if r7[0]<80: uart.write("@L\r\n") else : uart.write("@R\r\n") if num==8: r8 = img.find_template( template3, 0.70, step=4, search=SEARCH_EX ) if r8: if r8[0]<80: uart.write("@L\r\n") else : uart.write("@R\r\n") print(clock.fps())