openmv在IDE运行时,串口接收和发送数据都是正常的,但是脱机运行时,能正常发送数据却不能正常接收数据,这是什么原因?
import sensor, image, time, os, tf, math, uos, gc
from pyb import UART, Timer, LED
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QQVGA)
sensor.set_windowing((240, 240))
sensor.skip_frames(time=2000)
net = None
labels = None
min_confidence = 0.5
try:
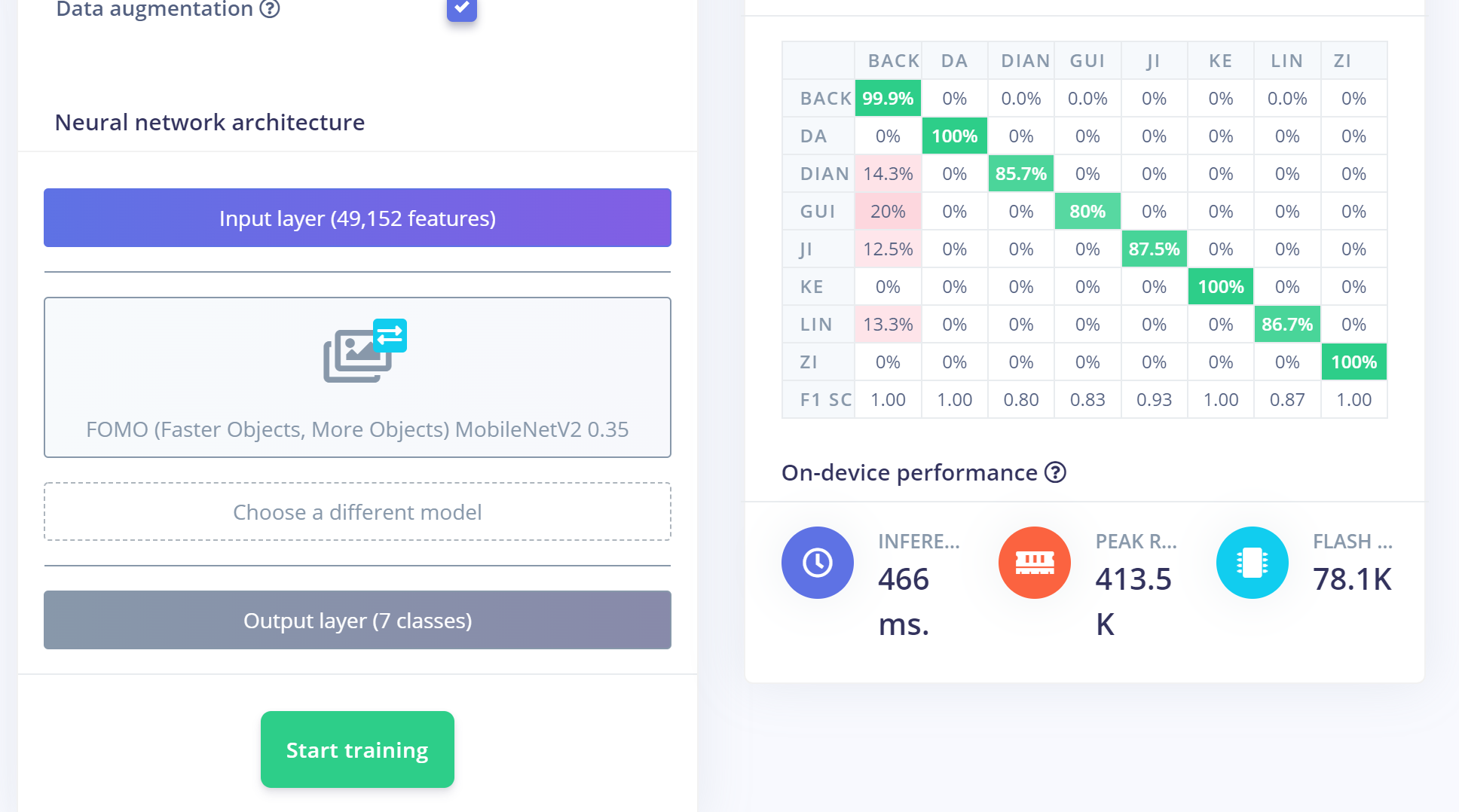
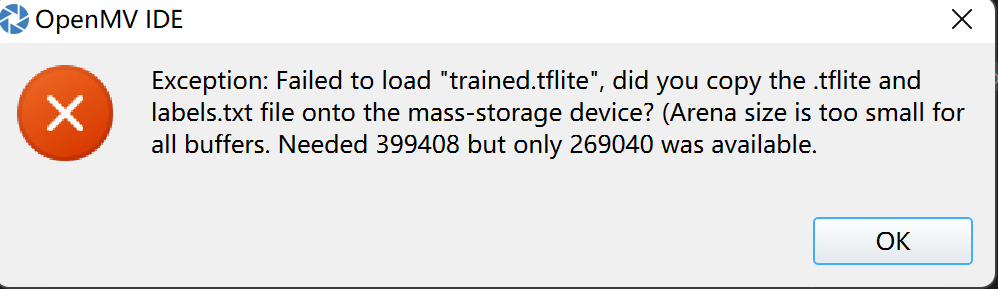
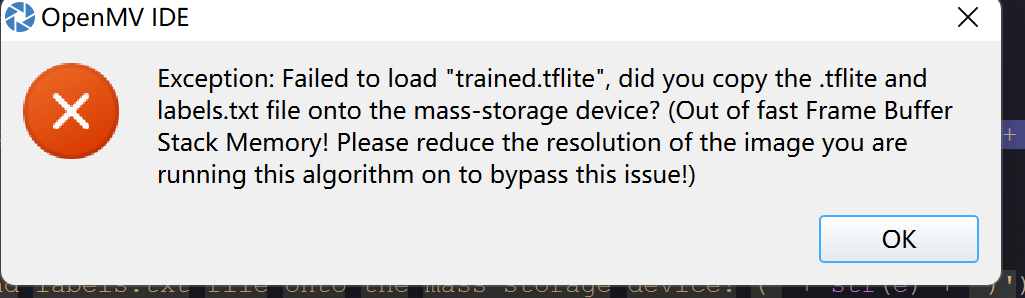
net = tf.load("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024)))
except Exception as e:
raise Exception('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
try:
labels = [line.rstrip('\n') for line in open("labels.txt")]
except Exception as e:
raise Exception('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
colors = [
(255, 0, 0),
( 0, 255, 0),
(255, 255, 0),
( 0, 0, 255),
(255, 0, 255),
( 0, 255, 255),
(255, 255, 255),
]
clock = time.clock()
global uart_r
uart_r = [0xAA, 0xAF, 0x05, 0x02, 0x00, 0x00, 0x00, 0x00]
class Saveimage(object):
def __init__(self):
pass
def Recognize(self,img):
self.img = img
for i, detection_list in enumerate(net.detect(self.img, thresholds=[(math.ceil(min_confidence * 255), 255)])):
if (i == 0): continue
if (len(detection_list) == 0): continue
print("recognize to: "+labels[i])
if labels[i]=='lin':
sensor.snapshot().save("lin.jpg")
uart_bufl[6] = 0xAA
print("Save lin.")
elif labels[i]=='ke':
sensor.snapshot().save("ke.jpg")
uart_bufl[6] = 0xBB
print("Save ke.")
elif labels[i]=='da':
sensor.snapshot().save("da.jpg")
uart_bufl[6] = 0xCC
print("Save da.")
sensor.snapshot().save("other.jpg")
print("Save other.")
Saveimg=Saveimage()
uart = UART(3,115200)
uart.init(115200,8, parity=None, stop=1)
def ReceiveB():
global uart_r
size = uart.any()
if size<=len(uart_r):
for i in range(0,size):
uart_r[i] = uart.readchar()
if uart_r[0]!=0xAA:
uart_r = [0xAA, 0xAF, 0x05, 0x02, 0x00, 0x00, 0x00, 0x00]
LED(1).on()
LED(2).off()
elif uart_r[1]!=0xAF:
uart_r = [0xAA, 0xAF, 0x05, 0x02, 0x00, 0x00, 0x00, 0x00]
LED(1).on()
LED(2).off()
elif uart_r[2]!=0x05:
uart_r = [0xAA, 0xAF, 0x05, 0x02, 0x00, 0x00, 0x00, 0x00]
LED(1).on()
LED(2).off()
else:
LED(1).off()
LED(2).on()
uart_bufl = bytearray([0xAA,0xFF, 0xAA, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00])
def uartsend(timer):
uart.write(uart_bufl)
def updatesend(custom, cx, cy, distance):
i=0
sum = 0
add = 0
uart_bufl[2] = custom;
uart_bufl[4] = cx;
uart_bufl[5] = cy;
uart_bufl[6] = distance;
uart_bufl[3] = len(uart_bufl)-6;
while i<(len(uart_bufl)-2):
sum = sum+uart_bufl[i]
add = add+sum
i+=1
uart_bufl[-2] = sum;
uart_bufl[-1] = add;
tim = Timer(2, freq=20)
tim.callback(uartsend)
while(True):
clock.tick()
ReceiveB()
print(str(uart_r))
if uart_r[5]==0xDD:
img0 = sensor.snapshot()
Saveimg.Recognize(img0)
LED(3).on()
LED(1).off()
LED(2).off()
print("Saving......")
elif uart_r[5]==0xEE:
if uart_r[4]!=0x06:
print("Now is locking mode\r\n")
img1 = sensor.snapshot()
lockimg = ''
for i, detection_list in enumerate(net.detect(img1, thresholds=[(math.ceil(min_confidence * 255), 255)])):
if (i == 0): continue
if (len(detection_list) == 0): continue
lockimg = labels[i]
uart_bufl[7] = 0xCC
print('reading:'+lockimg)
else:
img2 = sensor.snapshot()
for k, detection_list in enumerate(net.detect(img2, thresholds=[(math.ceil(min_confidence * 255), 255)])):
if (k == 0): continue
if (len(detection_list) == 0): continue
if labels[k]==lockimg:
print(lockimg+labels[k]+'\r\n')
for d in detection_list:
[x, y, w, h] = d.rect()
center_x = math.floor(x + (w / 2))
center_y = math.floor(y + (h / 2))
distance = int((80-center_x)*100*0.0024/0.42)
uart_bufl[4] = center_x
uart_bufl[5] = center_y
uart_bufl[6] = distance
LED(3).on()
LED(1).off()
LED(2).off()
print('%d',distance)
else:
uart_bufl[6] = 0x3C
print("Don't get picture!")
else:
print("Wait enter a recognization mode!")
print(clock.fps(), "fps", end="\n\n")