@kidswong999 谢谢我已经自己找到问题了,中间漏了一个invert的参数
A
aq5x
@aq5x
0
声望
5
楼层
417
资料浏览
0
粉丝
0
关注
aq5x 发布的帖子
-
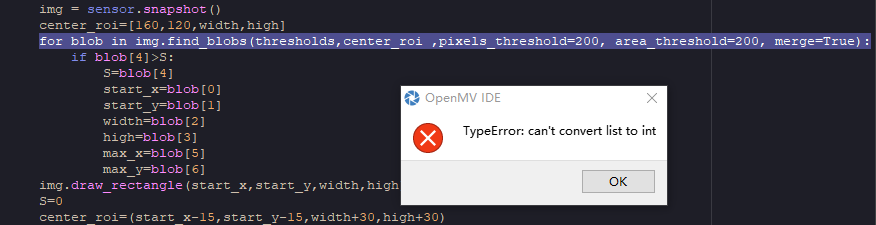
can't convert list to int发布在 OpenMV Cam
# UART Control # # This example shows how to use the serial port on your OpenMV Cam. Attach pin # P4 to the serial input of a serial LCD screen to see "Hello World!" printed # on the serial LCD display. from pyb import UART import sensor, image, time, math # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green/blue things. You may wish to tune them... sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() # Always pass UART 3 for the UART number for your OpenMV Cam. # The second argument is the UART baud rate. For a more advanced UART control # example see the BLE-Shield driver. uart = UART(3, 115200) width=10 high=10 lab_l_min=100 lab_l_max=0 lab_a_min=128 lab_a_max=-127 lab_b_min=128 lab_b_max=-127 while(True): clock = time.clock() img = sensor.snapshot() img.draw_rectangle(160-(width//2),120-(high//2),width,high,color = (0, 0, 255), thickness = 2,size = 10 ) a=0 b=0 if uart.any(): a= uart.readline().decode() print(a) b=int(a) if b==1: print(12345) width=width+10 if b==2: high=high+10 if b==3: while(True): for i in range(width): for j in range(high): if(i==0 and j==0): lab_l_min=100 lab_l_max=0 lab_a_min=128 lab_a_max=-127 lab_b_min=128 lab_b_max=-127 print(lab_l_min) (r,g,b)=img.get_pixel(120-width//2,160-high//2) (lab_l,lab_a,lab_b)=image.rgb_to_lab(r,g,b) if lab_l<lab_l_min: lab_l_min=int (lab_l) if lab_l>lab_l_max: lab_l_max=int (lab_l) if lab_a<lab_a_min: lab_a_min=int (lab_a) if lab_a>lab_a_max: lab_a_max=int (lab_a) if lab_b>lab_b_max: lab_b_max=int (lab_b) if lab_b<lab_b_min: lab_b_min=int (lab_b) print(lab_l_min,lab_l_max,lab_a_min,lab_a_max,lab_b_min,lab_b_max) thresholds = [(lab_l_min,lab_l_max,lab_a_min,lab_a_max,lab_b_min,lab_b_max)] # 色块追踪选择阈值 max_x=0 max_y=0 high=0 width=0 S=0 while(True): clock.tick() img = sensor.snapshot() center_roi=[160,120,width,high] for blob in img.find_blobs(thresholds,center_roi ,pixels_threshold=200, area_threshold=200, merge=True): if blob[4]>S: S=blob[4] start_x=blob[0] start_y=blob[1] width=blob[2] high=blob[3] max_x=blob[5] max_y=blob[6] img.draw_rectangle(start_x,start_y,width,high) S=0 center_roi=(start_x-15,start_y-15,width+30,high+30) print(width,S,high,max_x,max_y) print(clock.fps()) -
USART通信连接不上发布在 OpenMV Cam
用串口调试助手查看USART通讯发送数据, 打开了串口调试助手,但是在连接openmv的时候IDE显示正在连接(如果连接超过5秒钟请断开),很长时间都连不上。取消之后显示错误:拒绝访问1