找到原因了 把列表里的“bottle”这种的判断删去就没事了
A
aiol
@aiol
0
声望
11
楼层
648
资料浏览
0
粉丝
0
关注
aiol 发布的帖子
-
RE: 怎么比较神经网络识别的正确率大小呢发布在 OpenMV Cam
if predictions_list[i][0]=='bottle' and float(predictions_list[i][1])>0.8:
就我这句错了 说我越界了 要怎么写才是对的呢 -
怎么比较神经网络识别的正确率大小呢发布在 OpenMV Cam
import sensor, image, time, os, tf, time from pyb import Servo sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240, 240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. net = "trained.tflite" labels = [line.rstrip('\n') for line in open("labels.txt")] s1 = Servo(1) # P7连接舵机的PWM线 s2 = Servo(2) # P8 clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # default settings just do one detection... change them to search the image... for obj in tf.classify(net, img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5): print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect()) img.draw_rectangle(obj.rect()) # This combines the labels and confidence values into a list of tuples predictions_list = list(zip(labels, obj.output())) for i in range(len(predictions_list)): print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) if predictions_list[i][0]=='battery' and predictions_list[i][1]>0.8: #在什么概率下 进行不同的动作 print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) for i in range(-180,-90): s1.angle(0) s2.angle(i) time.sleep(10) if predictions_list[i][0]=='bottle' and float(predictions_list[i][1])>0.8: print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) for i in range(-180,0): s1.angle(90) s2.angle(i) time.sleep(10) if predictions_list[i][0]=='can' and float(predictions_list[i][1])>0.8: print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) for i in range(-180,90): s1.angle(180) s2.angle(i) time.sleep(10) if predictions_list[i][0]=='cigarette' and float(predictions_list[i][1])>0.8: print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) for i in range(-180,180):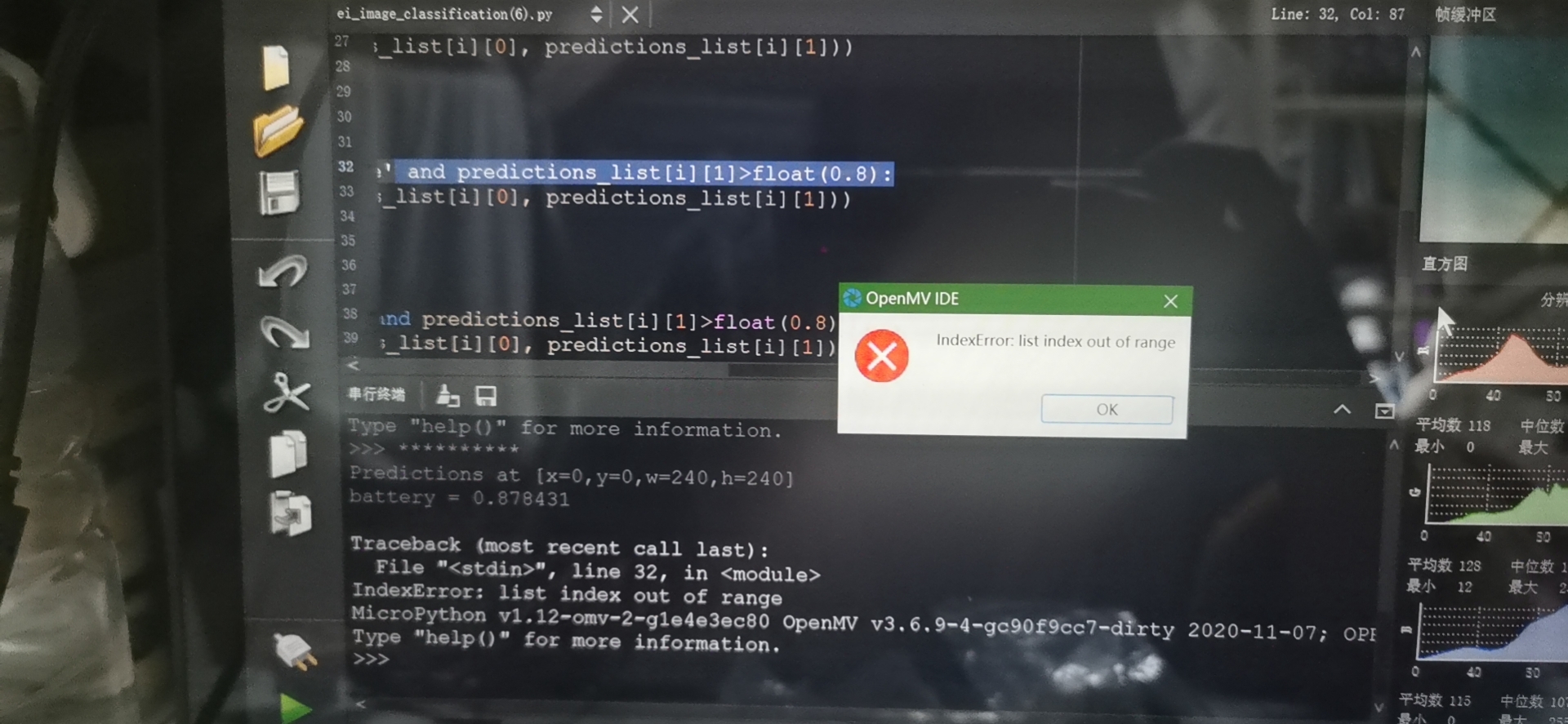 s1.angle(270) s2.angle(i) time.sleep(10) -
这是我写的代码,我是接受到串口猜开启人脸识别的 可一运行程序 芯片就发烫发布在 OpenMV Cam
import sensor, time, image, pyb, machine from pyb import UART sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) sensor.set_pixformat(sensor.GRAYSCALE) uart = UART(3, 19200, timeout_char = 1000) face_cascade = image.HaarCascade("frontalface", stages=25) print(face_cascade) # FPS clock clock = time.clock() while (True): clock.tick() if uart.any(): a = uart.readline() print (a) start = pyb.millis() while a==b'1': img = sensor.snapshot() objects = img.find_features(face_cascade, threshold=0.75, scale_factor=1.25) for r in objects: img.draw_rectangle(r) if r[1]>50: print ('incorrect') elif r[1]<50: print ('correct') if pyb.millis() - start>60000: print ('failed') break if objects: print ('success') break -
RE: 请问怎么用openmv写识别到人脸的时间到没有人脸的时间呢?发布在 OpenMV Cam
我是想写 openmv识别到人脸后记录开始时间 如果1分钟内识别不到人脸 就记为结束时间 完了结束时间-开始时间=时间段 然后我想通过串口助手发送这个时间段给别的单片机