image.lens_corr([strength=1.8[, zoom=1.0]])
2.8mm的参数是1.8,那12mm镜头的参数默认值是多少?
此外,设置畸变矫正后会影响运算速度吗?
6
6wyk
@6wyk
4
声望
8
楼层
756
资料浏览
0
粉丝
0
关注
6wyk 发布的帖子
-
12mm镜头畸变矫正参数默认值是多少?发布在 OpenMV Cam
-
为什么说我sqrt未定义?发布在 OpenMV Cam
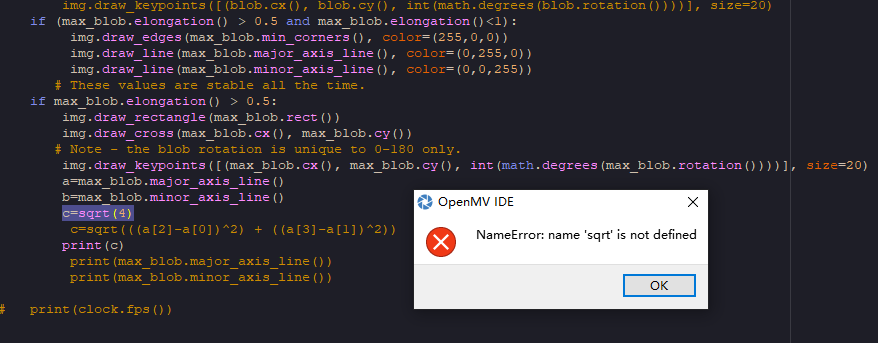

import sensor, image, time, math # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green things. You may wish to tune them... #thresholds = [(30, 100, 15, 127, 15, 127), # generic_red_thresholds # (30, 100, -64, -8, -32, 32), # generic_green_thresholds # (0, 15, 0, 40, -80, -20)] # generic_blue_thresholds # You may pass up to 16 thresholds above. However, it's not really possible to segment any # scene with 16 thresholds before color thresholds start to overlap heavily. thresholds = [(10, 65, 30, 80, 10, 70)] sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() # Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are # returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the # camera resolution. Don't set "merge=True" becuase that will merge blobs which we don't want here. def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot() blobs=img.find_blobs(thresholds, pixels_threshold=40, area_threshold=40) if(blobs): max_blob=find_max(blobs) # for blob in img.find_blobs(thresholds, pixels_threshold=200, area_threshold=200): # These values depend on the blob not being circular - otherwise they will be shaky. # if blob.elongation() > 0.5: # img.draw_edges(blob.min_corners(), color=(255,0,0)) # img.draw_line(blob.major_axis_line(), color=(0,255,0)) # img.draw_line(blob.minor_axis_line(), color=(0,0,255)) # These values are stable all the time. # img.draw_rectangle(blob.rect()) # img.draw_cross(blob.cx(), blob.cy()) # Note - the blob rotation is unique to 0-180 only. # img.draw_keypoints([(blob.cx(), blob.cy(), int(math.degrees(blob.rotation())))], size=20) if (max_blob.elongation() > 0.5 and max_blob.elongation()<1): img.draw_edges(max_blob.min_corners(), color=(255,0,0)) img.draw_line(max_blob.major_axis_line(), color=(0,255,0)) img.draw_line(max_blob.minor_axis_line(), color=(0,0,255)) # These values are stable all the time. if max_blob.elongation() > 0.5: img.draw_rectangle(max_blob.rect()) img.draw_cross(max_blob.cx(), max_blob.cy()) # Note - the blob rotation is unique to 0-180 only. img.draw_keypoints([(max_blob.cx(), max_blob.cy(), int(math.degrees(max_blob.rotation())))], size=20) a=max_blob.major_axis_line() b=max_blob.minor_axis_line() c=sqrt(4) # c=sqrt(((a[2]-a[0])^2) + ((a[3]-a[1])^2)) print(c) -
RE: 请问这个函数image.blob.elongation的返回值是以什么为依据的发布在 OpenMV Cam
@kidswong999 你好啊,我看到了他的英文注释,只是不理解他这个返回对象的长度是什么意思,是表示类似置信度这样一个概念吗?
-
RE: 请问颜色识别里面if blob.elongation() > 0.5:这行代码是什么意思呢发布在 OpenMV Cam
@kidswong999 你好啊,我看到了他的英文注释,只是不理解他这个返回对象的长度是什么意思,是表示类似置信度这样一个概念吗?
 在这儿用到
在这儿用到