@kidswong999 不是寄存器问题,我感觉是SPI配置的问题,可否指点一下
6
6pdh 发布的帖子
-
RE: 驱动自己的LCD,帧率很低,SPI速率问题?发布在 OpenMV Cam
这里是代码
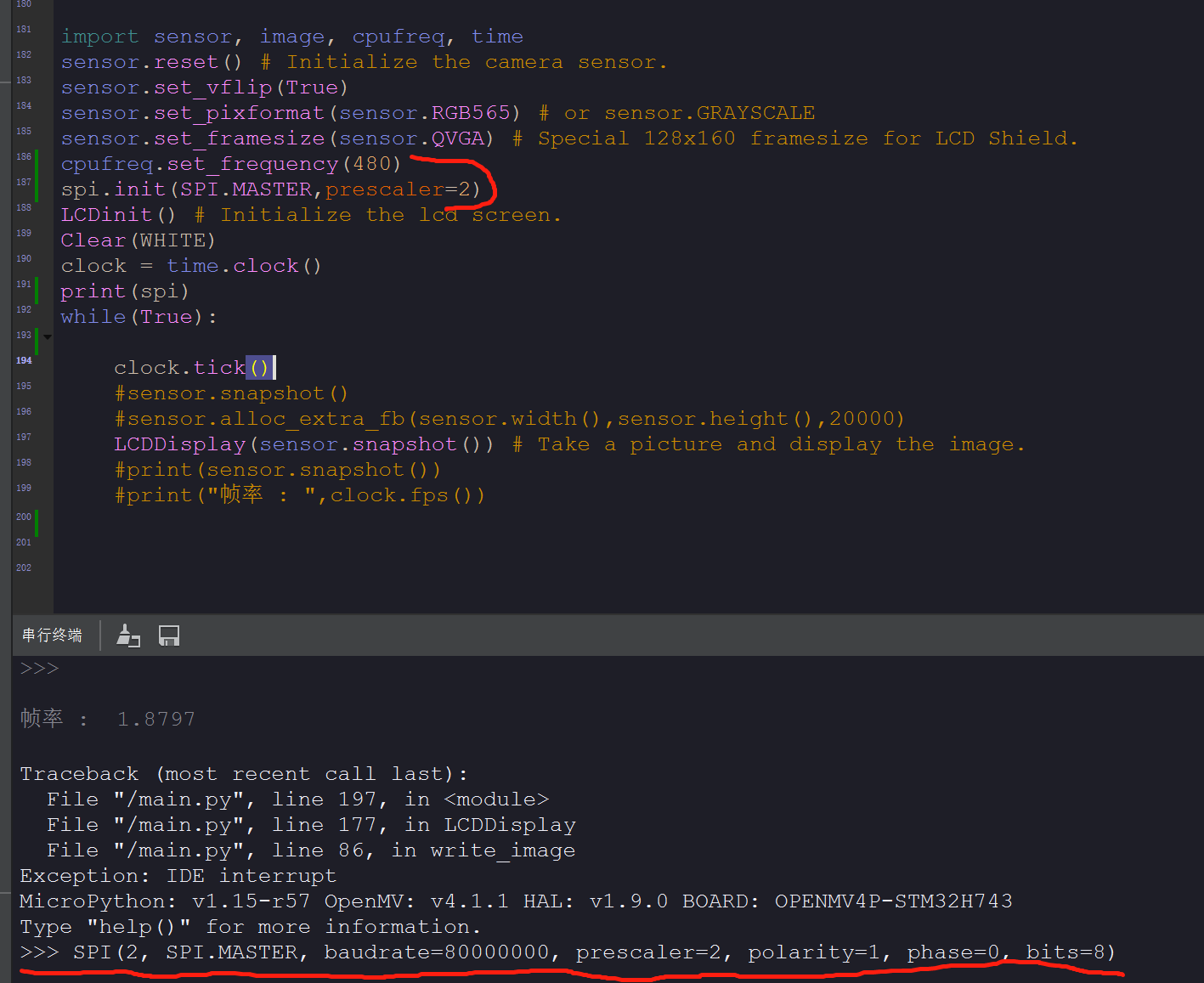
## OpenMV 驱动自己的LCD屏 # 驱动IC ST7789 # 分辨率 240*240 QVGA 1.54寸 import time from pyb import Pin, SPI # IO接线: # SDO/MISO ---> P1(MISO) 如果不读LCD颜色,可不接 # LED ---> P6 (背光控制) 可直接 接VCC,开机亮屏 # SCK ---> P2(SCLK) SCLK 时钟线 # SDI/MOSI ---> P0(MOSI) SDA 数据线 # DO/RS ---> P8 数据命令选择线 # RESET ---> P7 复位线 # CS ---> P5 片选线 # GND ---> GND # VCC ---> 3.3V cs = Pin("P5", Pin.OUT_OD) rst = Pin("P7", Pin.OUT_PP) rs = Pin("P8", Pin.OUT_PP) bl = Pin("P6", Pin.OUT_PP) # 背光控制 # 定义横屏/竖屏 USE_HORIZONTAL = True # 定义横屏 IMAGE_INVER = True # 旋转180° # TFT resolution 240*320 X_MIN_PIXEL = 0 Y_MIN_PIXEL = 0 if USE_HORIZONTAL: X_MAX_PIXEL = 240 # 定义屏幕宽度 Y_MAX_PIXEL = 240 # 定义屏幕高度 else: X_MAX_PIXEL = 240 # 定义屏幕宽度 Y_MAX_PIXEL = 240 # 定义屏幕高度 # 常用颜色表 #可去除 RED = 0XF800 GREEN = 0X07E0 BLUE = 0X001F BLACK = 0X0000 YELLOW = 0XFFE0 WHITE = 0XFFFF CYAN = 0X07FF BRIGHT_RED = 0XF810 GRAY1 = 0X8410 GRAY2 = 0X4208 # OpenMV SPI2 总线 8位数据模式 spi = SPI(2, SPI.MASTER, polarity=0, phase=0) # SPI 写命令 def write_command_byte(c): cs.low() rs.low() spi.send(c) cs.high() # SPI 写数据 def write_data_byte(data): cs.low() rs.high() spi.send(data) cs.high() def write_command(c, *data): #命令数据一起写,先写命令 第二个开始为数据位。如果只写一个,则代表不写数据只写命令。 write_command_byte(c) if data: for d in data: if d > 0xFF: write_data_byte(d >> 8) write_data_byte(d&0xFF) else: write_data_byte(d) def write_image(img): SetRegion(0, 0, sensor.height()-1 , sensor.width()-1 ) cs.low() rs.high() fbuf = bytearray(500)#建立帧缓冲区,对于每个RGB565像素,帧缓冲区都需2字节 fbuf=img.bytearray() spi.send(fbuf) for m in img: #把一帧图像的对象取出来,放到帧缓存区中 fbuf=m for i in range(0,sensor.height()): #每行每行的发送 spi.send(fbuf[i]>>8) #先发第N行的第I个数据的高八位 spi.send(fbuf[i]&0xFF) #再发低八位 cs.high() def SetXY(xpos, ypos): write_command(0x2A, xpos>>8, xpos&0XFF) write_command(0x2B, ypos>>8, ypos&0XFF) write_command(0x2C) def SetRegion(xStar, yStar, xEnd, yEnd): write_command(0x2A, xStar>>8, xStar&0XFF, xEnd>>8, xEnd&0XFF) write_command(0x2B, yStar>>8, yStar&0XFF, yEnd>>8, yEnd&0XFF) write_command(0x2C) # 在指定位置绘制一个点 def DrawPoint(x, y, Color): SetXY(x, y) write_data_byte(Color >> 8) write_data_byte(Color&0XFF) def ReadPoint(x, y): data = 0 SetXY(x, y) write_data_byte(data) return data def Clear(Color): global X_MAX_PIXEL, Y_MAX_PIXEL SetRegion(0, 0, X_MAX_PIXEL-1 , Y_MAX_PIXEL-1 ) #cs.low() #rs.high() for i in range(0, Y_MAX_PIXEL): for m in range(0, X_MAX_PIXEL): write_data_byte(Color >> 8) write_data_byte(Color&0xFF) def LCDinit(): SetRegion(0, 0, X_MAX_PIXEL-1 , Y_MAX_PIXEL-1 ) rst.low() time.sleep_ms(100) rst.high() time.sleep_ms(100) bl.high() # 拉背光 write_command(0x11) time.sleep_ms(120) # Memory Data Access Control if USE_HORIZONTAL: # //C8 //48 68竖屏//28 E8 横屏 if IMAGE_INVER: write_command(0x36, 0x00) # 从右到左 e8/68 else: write_command(0x36, 0xC0) # 从左到右 28 else: if IMAGE_INVER: write_command(0x36, 0x70) # 从下到上刷 else: write_command(0x36, 0xA0) # 从上到下刷 write_command(0x3A,0x05) write_command(0xB2, 0x0C, 0x0C, 0x00, 0x33, 0x33) write_command(0xB7, 0x35) write_command(0xBB, 0x32) write_command(0xC2,0x01) write_command(0xc3,0x15) write_command(0xc4,0x20) write_command(0xC6,0x05) write_command(0xD0,0xA4,0xA1) write_command(0xE0,0xD0,0x08,0x0E,0x09,0x09,0x05,0x31,0x33,0x48,0x17,0x14,0x15,0x31,0x34) write_command(0xE1,0xD0,0x08,0x0E,0x09,0x09,0x15,0x31,0x33,0x48,0x17,0x14,0x15,0x31,0x34) # Interface Pixel Format write_command(0x21) # Display On write_command(0x29) #write_command(0x2C) def LCDDisplay(img): #write_command(0x2C) write_image(img) import sensor, image, cpufreq, time sensor.reset() # Initialize the camera sensor. sensor.set_vflip(True) sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE sensor.set_framesize(sensor.QVGA) # Special 128x160 framesize for LCD Shield. cpufreq.set_frequency(480) spi.init(SPI.MASTER,prescaler=2) LCDinit() # Initialize the lcd screen. Clear(WHITE) clock = time.clock() print(spi) while(True): clock.tick() #sensor.snapshot() #sensor.alloc_extra_fb(sensor.width(),sensor.height(),20000) LCDDisplay(sensor.snapshot()) # Take a picture and display the image. #print(sensor.snapshot()) #print("帧率 : ",clock.fps()) -
RE: 驱动自己的LCD,帧率很低,SPI速率问题?发布在 OpenMV Cam
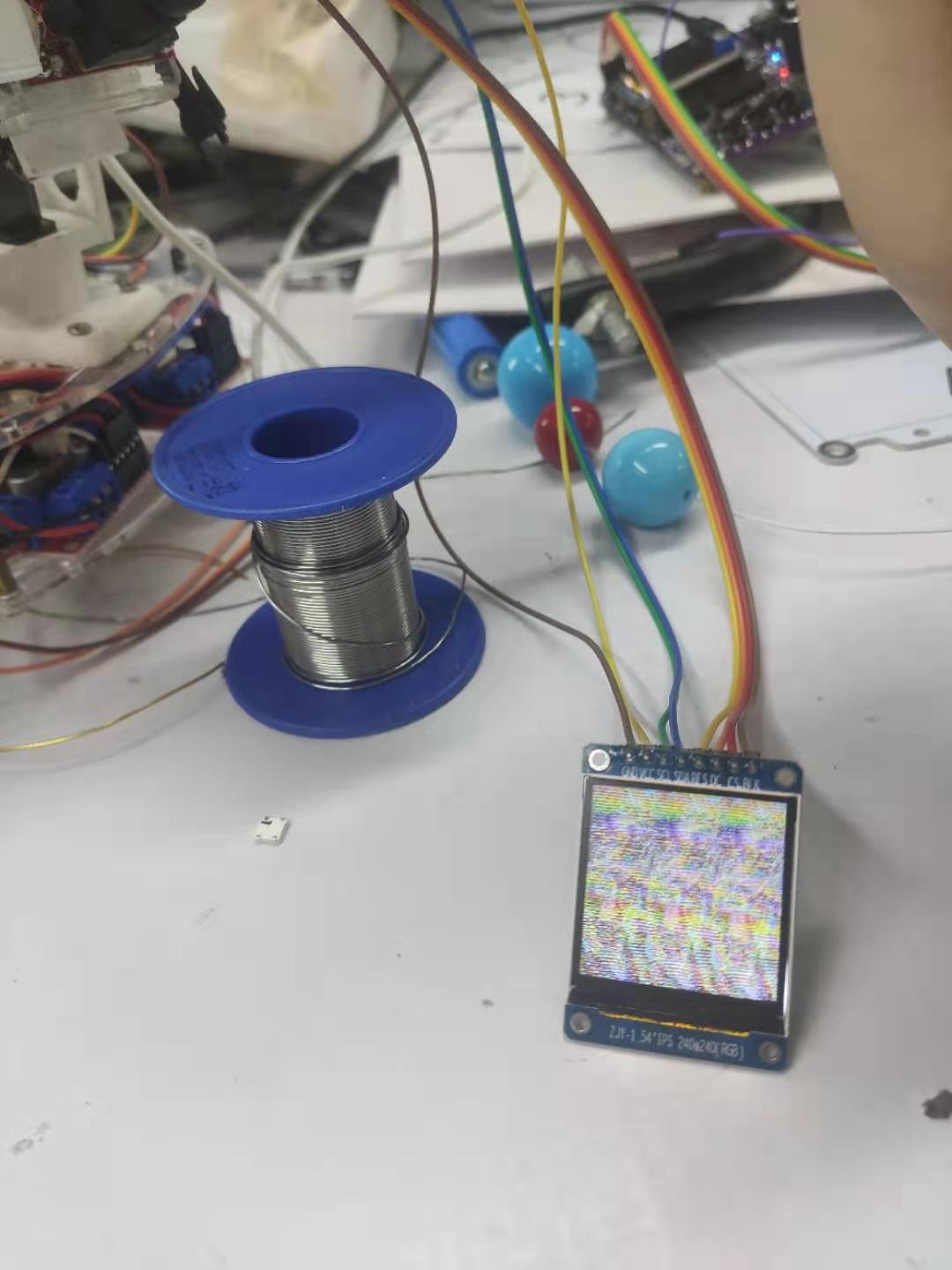
我尝试了一下使用您发的例程中直接将图片数据传入SPI.send(),帧率确实流畅了,但是屏幕变成了花屏,画面发生变化的屏幕也会发生变化,说明确实是有一定的数据传输过来了,请指教一下 -
驱动自己的LCD,帧率很低,SPI速率问题?发布在 OpenMV Cam
请在这里粘贴代码 ## OpenMV 驱动自己的LCD屏 # 驱动IC ILI9341 # 分辨率 240*240 QVGA 1.54寸 import time from pyb import Pin, SPI # IO接线: # SDO/MISO ---> P1(MISO) 如果不读LCD颜色,可不接 # LED ---> P6 (背光控制) 可直接 接VCC,开机亮屏 # SCK ---> P2(SCLK) SCLK 时钟线 # SDI/MOSI ---> P0(MOSI) SDA 数据线 # DO/RS ---> P8 数据命令选择线 # RESET ---> P7 复位线 # CS ---> P5 片选线 # GND ---> GND # VCC ---> 3.3V cs = Pin("P5", Pin.OUT_OD) rst = Pin("P7", Pin.OUT_PP) rs = Pin("P8", Pin.OUT_PP) bl = Pin("P6", Pin.OUT_PP) # 背光控制 # 定义横屏/竖屏 USE_HORIZONTAL = True # 定义横屏 IMAGE_INVER = True # 旋转180° # TFT resolution 240*320 X_MIN_PIXEL = 0 Y_MIN_PIXEL = 0 if USE_HORIZONTAL: X_MAX_PIXEL = 240 # 定义屏幕宽度 Y_MAX_PIXEL = 240 # 定义屏幕高度 else: X_MAX_PIXEL = 240 # 定义屏幕宽度 Y_MAX_PIXEL = 240 # 定义屏幕高度 # 常用颜色表 #可去除 RED = 0XF800 GREEN = 0X07E0 BLUE = 0X001F BLACK = 0X0000 YELLOW = 0XFFE0 WHITE = 0XFFFF CYAN = 0X07FF BRIGHT_RED = 0XF810 GRAY1 = 0X8410 GRAY2 = 0X4208 # OpenMV SPI2 总线 8位数据模式 spi = SPI(2, SPI.MASTER,baudrate=48000000,prescaler=1,polarity=0, phase=0,bits=8,firstbit=SPI.MSB) # SPI 写命令 def write_command_byte(c): cs.low() rs.low() spi.send(c) cs.high() # SPI 写数据 def write_data_byte(data): cs.low() rs.high() spi.send(data) cs.high() def write_command(c, *data): #命令数据一起写,先写命令 第二个开始为数据位。如果只写一个,则代表不写数据只写命令。 write_command_byte(c) if data: for d in data: if d > 0xFF: write_data_byte(d >> 8) write_data_byte(d&0xFF) else: write_data_byte(d) def write_image(img): SetRegion(0, 0, sensor.height()-1 , sensor.width()-1 ) cs.low() rs.high() fbuf = bytearray(500)#建立帧缓冲区,对于每个RGB565像素,帧缓冲区都需2字节 for m in img: #把一帧图像的对象取出来,放到帧缓存区中 fbuf=m for i in range(0,sensor.height()): #每行每行的发送 spi.send(fbuf[i]>>8) #先发第N行的第I个数据的高八位 spi.send(fbuf[i]&0xFF) #再发低八位 cs.high() def SetXY(xpos, ypos): write_command(0x2A, xpos>>8, xpos&0XFF) write_command(0x2B, ypos>>8, ypos&0XFF) write_command(0x2C) def SetRegion(xStar, yStar, xEnd, yEnd): write_command(0x2A, xStar>>8, xStar&0XFF, xEnd>>8, xEnd&0XFF) write_command(0x2B, yStar>>8, yStar&0XFF, yEnd>>8, yEnd&0XFF) write_command(0x2C) # 在指定位置绘制一个点 def DrawPoint(x, y, Color): SetXY(x, y) write_data_byte(Color >> 8) write_data_byte(Color&0XFF) def ReadPoint(x, y): data = 0 SetXY(x, y) write_data_byte(data) return data def Clear(Color): global X_MAX_PIXEL, Y_MAX_PIXEL SetRegion(0, 0, X_MAX_PIXEL-1 , Y_MAX_PIXEL-1 ) #cs.low() #rs.high() for i in range(0, Y_MAX_PIXEL): for m in range(0, X_MAX_PIXEL): write_data_byte(Color >> 8) write_data_byte(Color&0xFF) def LCDinit(): SetRegion(0, 0, X_MAX_PIXEL-1 , Y_MAX_PIXEL-1 ) rst.low() time.sleep_ms(100) rst.high() time.sleep_ms(100) bl.high() # 拉背光 write_command(0x11) time.sleep_ms(120) # Memory Data Access Control if USE_HORIZONTAL: # //C8 //48 68竖屏//28 E8 横屏 if IMAGE_INVER: write_command(0x36, 0x00) # 从右到左 e8/68 else: write_command(0x36, 0xC0) # 从左到右 28 else: if IMAGE_INVER: write_command(0x36, 0x70) # 从下到上刷 else: write_command(0x36, 0xA0) # 从上到下刷 write_command(0x3A,0x05) write_command(0xB2, 0x0C, 0x0C, 0x00, 0x33, 0x33) write_command(0xB7, 0x35) write_command(0xBB, 0x32) write_command(0xC2,0x01) write_command(0xc3,0x15) write_command(0xc4,0x20) write_command(0xC6,0x05) write_command(0xD0,0xA4,0xA1) write_command(0xE0,0xD0,0x08,0x0E,0x09,0x09,0x05,0x31,0x33,0x48,0x17,0x14,0x15,0x31,0x34) write_command(0xE1,0xD0,0x08,0x0E,0x09,0x09,0x15,0x31,0x33,0x48,0x17,0x14,0x15,0x31,0x34) # Interface Pixel Format write_command(0x21) # Display On write_command(0x29) #write_command(0x2C) def LCDDisplay(img): #write_command(0x2C) write_image(img) import sensor, image, cpufreq, time sensor.reset() # Initialize the camera sensor. sensor.set_vflip(True) sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE sensor.set_framesize(sensor.QVGA) # Special 128x160 framesize for LCD Shield. cpufreq.set_frequency(480) spi.init(SPI.MASTER,prescaler=2) LCDinit() # Initialize the lcd screen. Clear(WHITE) clock = time.clock() print(spi) while(True): clock.tick() #sensor.snapshot() #sensor.alloc_extra_fb(sensor.width(),sensor.height(),20000) LCDDisplay(sensor.snapshot()) # Take a picture and display the image. #print(sensor.snapshot()) #print("帧率 : ",clock.fps())