
# Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max)
# The below thresholds track in general red/green things. You may wish to tune them...
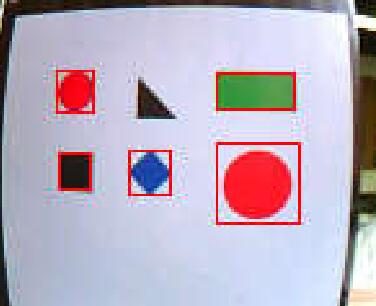
thresholds = [(63, 72, 27, 127, -128, 127), # generic_red_thresholds -> index is 0 so code == (1 << 0)
(30, 100, -64, -8, -32, 32), # generic_green_thresholds -> index is 1 so code == (1 << 1)
(97, 100, -5, 33, -3, 30)] # generic_blue_thresholds -> index is 2 so code == (1 << 2)
# Codes are or'ed together when "merge=True" for "find_blobs".
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
sensor.set_auto_exposure(False, 1500)#这里设置曝光时间
clock = time.clock()
# Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are
# returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the
# camera resolution. "merge=True" must be set to merge overlapping color blobs for color codes.
while(True):
clock.tick()
img = sensor.snapshot()
is_red=img.find_blobs([thresholds[0]],roi=(30,10,200,50),pixels_threshold=200, area_threshold=200)
is_green=img.find_blobs([thresholds[1]],roi=(30,10,200,50),pixels_threshold=200, area_threshold=200)
is_yellow=img.find_blobs([thresholds[2]],roi=(30,10,200,50),pixels_threshold=200, area_threshold=200)
if is_red:
print(1)
if is_green:
print(2)
if is_yellow:
print(3)