那能问下这些都弄好了之后怎么改写底层代码吗
5
5pqn 发布的帖子
-
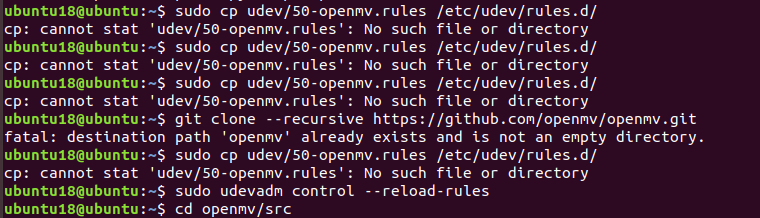
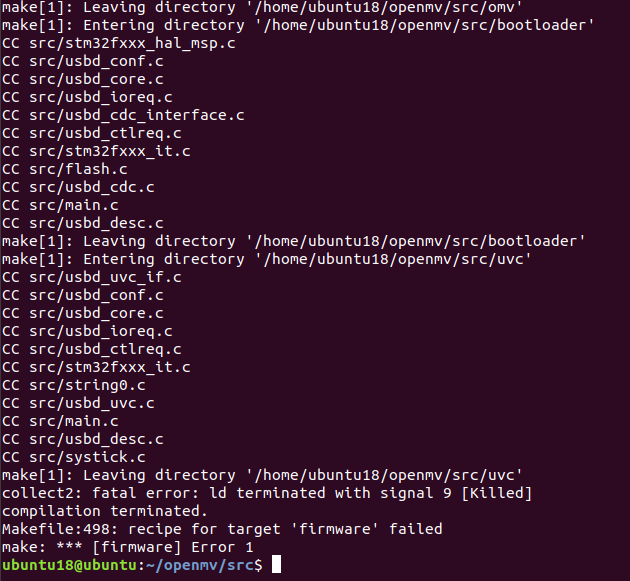
安装必须使用的软件的时候 显示sudo:command not found发布在 OpenMV Cam
openmv的
在编译固件里的安装必须使用的软件的时候
在Ubuntu的终端打sudo pip install numpy pyserial==2.7 pyusb==1.0.0b2 Pillow函数的时候显示sudo:command not found
这怎么办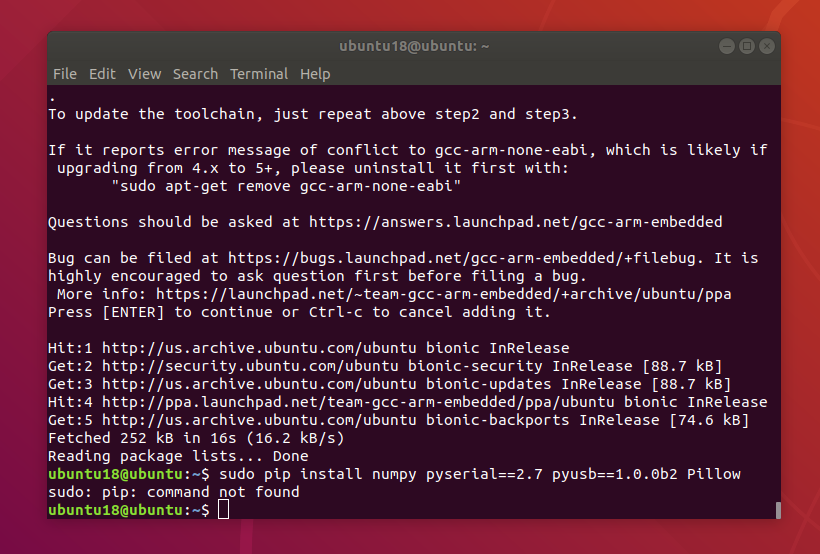
-
人脸辨别发布在 OpenMV Cam
我的是openmv2 m4的
在进行示例的人脸识别的时候精度很低,基本都识别错误,而且我只有3个人来辨别
是因为openmv2精度就是很低还是其他原因# Face recognition with LBP descriptors. # See Timo Ahonen's "Face Recognition with Local Binary Patterns". # # Before running the example: # 1) Download the AT&T faces database http://www.cl.cam.ac.uk/Research/DTG/attarchive/pub/data/att_faces.zip # 2) Exract and copy the orl_faces directory to the SD card root. import sensor, time, image, pyb sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s #SUB = "s1" NUM_SUBJECTS = 3 #图像库中不同人数,一共6人 NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片 # 拍摄当前人脸。 img = sensor.snapshot() #img = image.Image("singtown/%s/1.pgm"%(SUB)) d0 = img.find_lbp((0, 0, img.width(), img.height())) #d0为当前人脸的lbp特征 img = None pmin = 999999 num=0 def min(pmin, a, s): global num if a<pmin: pmin=a num=s return pmin for s in range(1, NUM_SUBJECTS+1): dist = 0 for i in range(2, NUM_SUBJECTS_IMGS+1): img = image.Image("singtown/s%d/%d.pgm"%(s, i)) d1 = img.find_lbp((0, 0, img.width(), img.height())) #d1为第s文件夹中的第i张图片的lbp特征 dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。 print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS)) pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。 print(pmin) print(num) # num为当前最匹配的人的编号。照片是拍了三组的,背景也是在全白背景下的
-
OSError: Image is not PGM!发布在 OpenMV Cam
OSError: Image is not PGM!
我是用openmv2 m4的板子
运行分辨人脸的时候出现这个错误OSError: Image is not PGM!
我是先拍了两套人脸的图片想试一下
也把人数改成了2了# Face recognition with LBP descriptors. # See Timo Ahonen's "Face Recognition with Local Binary Patterns". # # Before running the example: # 1) Download the AT&T faces database http://www.cl.cam.ac.uk/Research/DTG/attarchive/pub/data/att_faces.zip # 2) Exract and copy the orl_faces directory to the SD card root. import sensor, time, image, pyb sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s #SUB = "s1" NUM_SUBJECTS = 2 #图像库中不同人数,一共6人 NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片 # 拍摄当前人脸。 img = sensor.snapshot() #img = image.Image("singtown/%s/1.pgm"%(SUB)) d0 = img.find_lbp((0, 0, img.width(), img.height())) #d0为当前人脸的lbp特征 img = None pmin = 999999 num=0 def min(pmin, a, s): global num if a<pmin: pmin=a num=s return pmin for s in range(1, NUM_SUBJECTS+1): dist = 0 for i in range(1, NUM_SUBJECTS_IMGS+1): img = image.Image("singtown/s%d/%d.pgm"%(s, i)) d1 = img.find_lbp((0, 0, img.width(), img.height())) #d1为第s文件夹中的第i张图片的lbp特征 dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。 print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS)) pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。 print(pmin) print(num) # num为当前最匹配的人的编号。img = image.Image("singtown/s%d/%d.pgm"%(s, i))这句话出现了OSError: Image is not PGM!错误
-
RE: OSError: This function is unavailable on your OpenMV Cam发布在 OpenMV Cam
@kidswong999 emmmmmm可以额外问下那我还可以自己写底层函数来做形状识别的吗
-
MemoryError: Out of fast Frame Buffer Stack Memory!发布在 OpenMV Cam
MemoryError: Out of fast Frame Buffer Stack Memory! Please reduce the resolution of the image you are running this algorithm on to bypass this issue!
在试用模板示例的时候遇到MemoryError: Out of fast Frame Buffer Stack Memory! Please reduce the resolution of the image you are running this algorithm on to bypass this issue!问题是为什么啊
我也加了sd卡了,是M2ram不够大吗while (True): clock.tick() img = sensor.snapshot() # find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. r = img.find_template(template, 0.70, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) if r: img.draw_rectangle(r) print(clock.fps())中 r = img.find_template(template, 0.70, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
出问题 -
OSError: This function is unavailable on your OpenMV Cam发布在 OpenMV Cam
出现OSError: This function is unavailable on your OpenMV Cam问题
在运行寻找rects示例代码时出错了while(True): clock.tick() img = sensor.snapshot() # `threshold` below should be set to a high enough value to filter out noise # rectangles detected in the image which have low edge magnitudes. Rectangles # have larger edge magnitudes the larger and more contrasty they are... for r in img.find_rects(threshold = 10000): img.draw_rectangle(r.rect(), color = (255, 0, 0)) for p in r.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) print(r) print("FPS %f" % clock.fps())中 for r in img.find_rects(threshold = 10000):显示出错