import sensor, image, time, lcd
import json
from pyb import UART
green_threshold = (41, 66, -61, -27, 8, 43)
red_threshold = (41, 61, 42, 127, -128, 127)
yellow_threshold = ( 60 ,10,-15,20,30,80)
sensor.set_hmirror(True)
sensor.set_vflip(True)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA2)
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()
lcd.init() # Initialize the lcd screen.
uart = UART(3, 9600)
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
while(True):
clock.tick()
img = sensor.snapshot()
blobs0 = img.find_blobs([green_threshold])
blobs1 = img.find_blobs([red_threshold])
blobs2 = img.find_blobs([yellow_threshold])
if blobs0:
max_blob=find_max(blobs0)
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
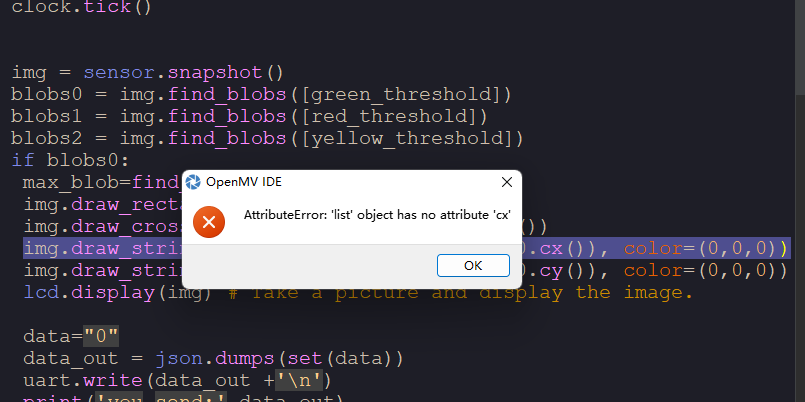
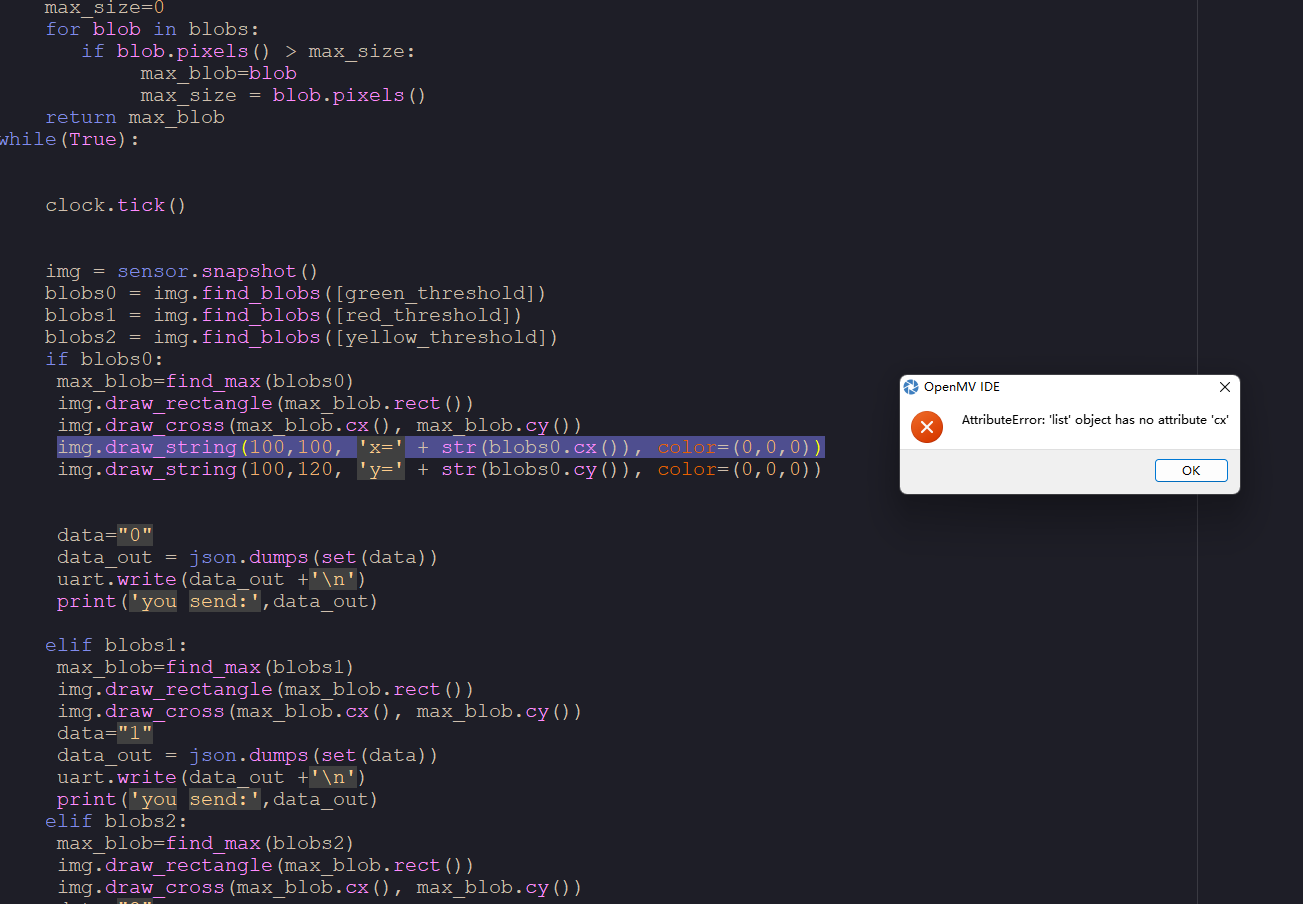
img.draw_string(100,100, 'x=' + str(blobs0.cx()), color=(0,0,0))
img.draw_string(100,120, 'y=' + str(blobs0.cy()), color=(0,0,0))
data="0"
data_out = json.dumps(set(data))
uart.write(data_out +'\n')
print('you send:',data_out)
elif blobs1:
max_blob=find_max(blobs1)
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
data="1"
data_out = json.dumps(set(data))
uart.write(data_out +'\n')
print('you send:',data_out)
elif blobs2:
max_blob=find_max(blobs2)
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
data="2"
data_out = json.dumps(set(data))
uart.write(data_out +'\n')
print('you send:',data_out)
else:
print('not found','4')
lcd.display(img) # Take a picture and display the image.