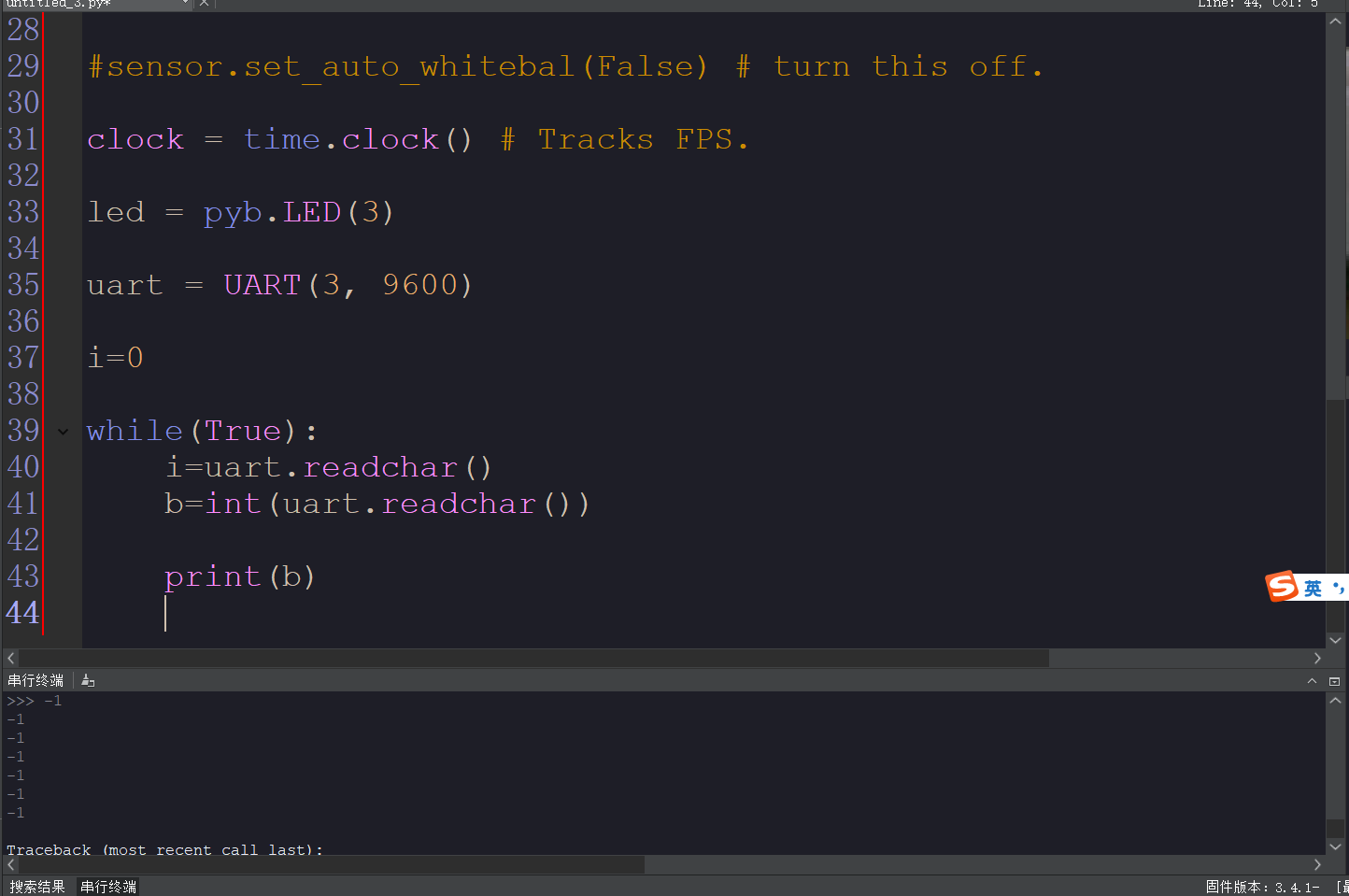
当openmv的串口没有收到数据时,为什么print函数一直现实的是一
# Blob Detection and uart transport
import sensor, image, time,pyb
from pyb import UART
import json
# For color tracking to work really well you should ideally be in a very, very,
# very, controlled enviroment where the lighting is constant...
yellow_threshold = (65, 100, -10, 6, 24, 51)
# You may need to tweak the above settings for tracking green things...
# Select an area in the Framebuffer to copy the color settings.
#sensor.reset() # Initialize the camera sensor.
#sensor.set_pixformat(sensor.RGB565) # use RGB565.
#sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
#sensor.skip_frames(10) # Let new settings take affect.
#sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
led = pyb.LED(3)
uart = UART(3, 9600)
i=0
while(True):
i=uart.readchar()
b=int(uart.readchar())
print(b)