这里用颜色来测距时,Lm是什么意思,实际长度?那例程中的length也是实际长度啊,Lm=色块长加宽除以2又是什么意思呀?
这里用颜色来测距时,Lm是什么意思,实际长度?那例程中的length也是实际长度啊,Lm=色块长加宽除以2又是什么意思呀?
# Measure the distance
#
# This example shows off how to measure the distance through the size in imgage
# This example in particular looks for yellow pingpong ball.
import sensor, image, time
# For color tracking to work really well you should ideally be in a very, very,
# very, controlled enviroment where the lighting is constant...
yellow_threshold = ( 56, 83, 5, 57, 63, 80)
# You may need to tweak the above settings for tracking green things...
# Select an area in the Framebuffer to copy the color settings.
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
K=5000#the value should be measured
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.
blobs = img.find_blobs([yellow_threshold])
if len(blobs) == 1:
# Draw a rect around the blob.
b = blobs[0]
img.draw_rectangle(b[0:4]) # rect
img.draw_cross(b[5], b[6]) # cx, cy
Lm = (b[2]+b[3])/2
length = K/Lm
print(length)
#print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while
# connected to your computer. The FPS should increase once disconnected.
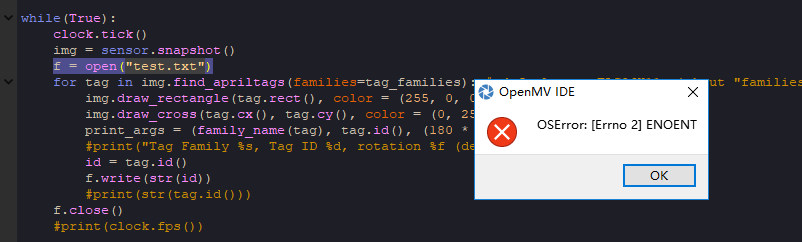
 但改为写入字符串就又出现了了不知名错误……
但改为写入字符串就又出现了了不知名错误……