不能通过调pid解决吗
2
2wir
@2wir
0
声望
13
楼层
632
资料浏览
0
粉丝
0
关注
2wir 发布的帖子
-
测距扩展板用不了,提示没有这个py文件发布在 OpenMV Cam
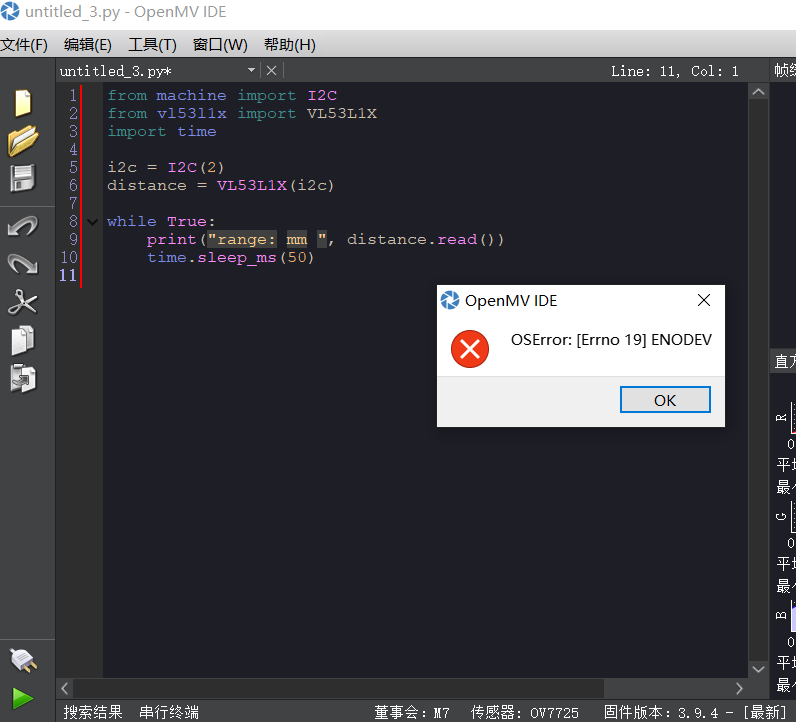
和视频步骤点击运行的时候没有提示保存VL53L1X,然后报错没有这个py文件怎么办from machine import I2C from vl53l1x import VL53L1X import time i2c = I2C(2) distance = VL53L1X(i2c) while True: print("range: mm ", distance.read()) time.sleep_ms(50) -
RE: 更新固件以后官网的追小球代码报错了发布在 OpenMV Cam
官网追小车实例的代码
car.pyfrom pyb import Pin, Timer
inverse_left=False #change it to True to inverse left wheel
inverse_right=False #change it to True to inverse right wheelain1 = Pin('P0', Pin.OUT_PP)
ain2 = Pin('P1', Pin.OUT_PP)
bin1 = Pin('P2', Pin.OUT_PP)
bin2 = Pin('P3', Pin.OUT_PP)
ain1.low()
ain2.low()
bin1.low()
bin2.low()pwma = Pin('P7')
pwmb = Pin('P8')
tim = Timer(4, freq=1000)
ch1 = tim.channel(1, Timer.PWM, pin=pwma)
ch2 = tim.channel(2, Timer.PWM, pin=pwmb)
ch1.pulse_width_percent(0)
ch2.pulse_width_percent(0)def run(left_speed, right_speed):
if inverse_left==True:
left_speed=(-left_speed)
if inverse_right==True:
right_speed=(-right_speed)if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(abs(left_speed)) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(abs(right_speed))
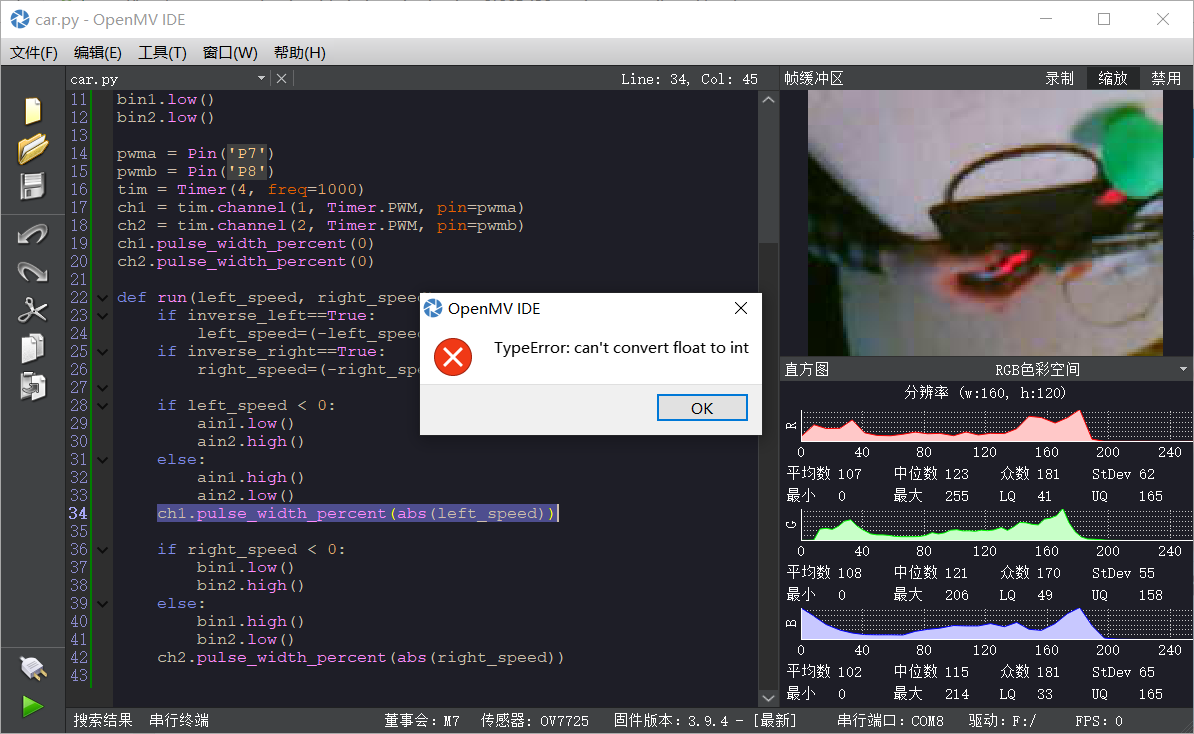 就像这样,一识别到小球就报这个错误
就像这样,一识别到小球就报这个错误