想X=70,Y=20高=210,宽=200的区域内进行颜色识别
1
18758559235
@18758559235
0
声望
6
楼层
978
资料浏览
0
粉丝
0
关注
18758559235 发布的帖子
-
为什设置感兴趣范围失败发布在 OpenMV Cam
import sensor, image, time from pyb import UART uart = UART(3, 9600) sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) #sensor.skip_frames(time = 2000) # Wait for settings take effect. sensor.skip_frames(10) clock = time.clock() # Create a clock object to track the FPS. sensor.set_auto_whitebal(False) red_threshold_01 = (90,100, -14, 17, -22, 15) ROI=(70,20,210,200) while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() # Take a picture and return the image. statistics=img.get_statistics(roi=ROI) blobs = img.find_blobs([red_threshold_01], area_threshold=70)#Less than that area will be filtered out if blobs: # print(blobs) for b in blobs: img.draw_rectangle(b[0:4]) img.draw_cross(b[5], b[6]) #m=[b[5],b[6]] #b[5]=231 #m=int(b[5]) m=str(b[5]) m=m+'d' n=str(b[6]) m=m+n m=m+'sp' #m='3sp' print(m,b[5]) uart.write(m) # print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected # to the IDE. The FPS should increase once disconnected. -
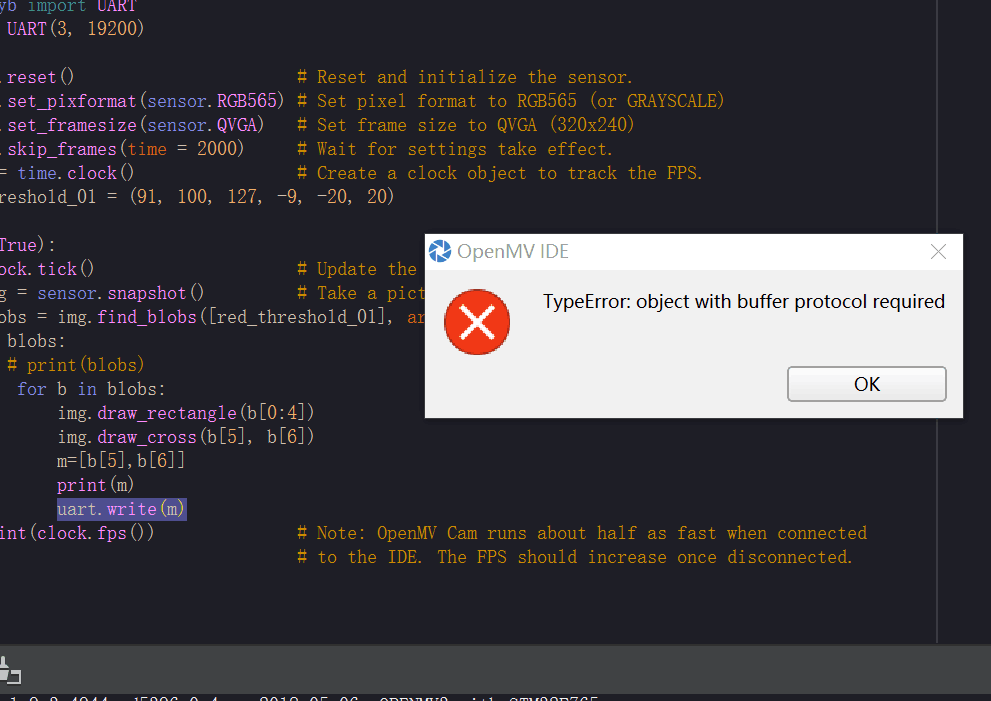
串口通讯失败发布在 OpenMV Cam
import sensor, image, time from pyb import UART uart = UART(3, 19200) sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.skip_frames(time = 2000) # Wait for settings take effect. clock = time.clock() # Create a clock object to track the FPS. red_threshold_01 = (91, 100, 127, -9, -20, 20) while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([red_threshold_01], area_threshold=150) if blobs: # print(blobs) for b in blobs: img.draw_rectangle(b[0:4]) img.draw_cross(b[5], b[6]) m=[b[5],b[6]] print(m) uart.write(m) print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected # to the IDE. The FPS should increase once disconnected.