import sensor, image, time, math, lcd
from pyb import UART
from pyb import LED
uart = UART(3, 115200)
LED(1).on()
LED(2).on()
LED(3).on()
lcd.init()
GRAYSCALE_THRESHOLD = [(0, 64)]
ROIS = [ # [ROI, weight]
(0, 100, 160, 20, 0.7), # You'll need to tweak the weights for you app
(0, 050, 160, 20, 0.3), # depending on how your robot is setup.
(0, 000, 160, 20, 0.1)
]
weight_sum = 0 #权值和初始化
for r in ROIS: weight_sum += r[4] # r[4] is the roi weight.
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # use grayscale.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(30,time = 2000) # Let new settings take affect.
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock() # Tracks FPS.
def send_frame(cx, cy):
uart.writechar(0xA5)
uart.writechar(0x5A)
uart.writechar(cx)
uart.writechar(cy)
uart.writechar(cx + cy)
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.
centroid_sum = 0
for r in ROIS:
blobs = img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4], merge=True)
# r[0:4] is roi tuple.
if blobs:
most_pixels = 0
largest_blob = 0
for i in range(len(blobs)):
if blobs[i].pixels() > most_pixels:
most_pixels = blobs[i].pixels()
largest_blob = i
img.draw_rectangle(blobs[largest_blob].rect())
img.draw_rectangle((0,0,30, 30))
#将此区域的像素数最大的颜色块画矩形和十字形标记出来
img.draw_cross(blobs[largest_blob].cx(),
blobs[largest_blob].cy())
centroid_sum += blobs[largest_blob].cx() * r[4] # r[4] is the roi weight.
center_pos = (centroid_sum / weight_sum) # Determine center of line.
deflection_angle = 0
deflection_angle = -math.atan((center_pos-80)/60)
deflection_angle = math.degrees(deflection_angle)
print("Turn Angle: %f" % deflection_angle)
send_frame(blobs[largest_blob].cx(), blobs[largest_blob].cy())
lcd.display(img)
print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while
1
18686015306
@18686015306
0
声望
2
楼层
515
资料浏览
0
粉丝
0
关注
18686015306 发布的帖子
-
运行的时候显示IndexError:list index out of range 怎么解决?发布在 OpenMV Cam
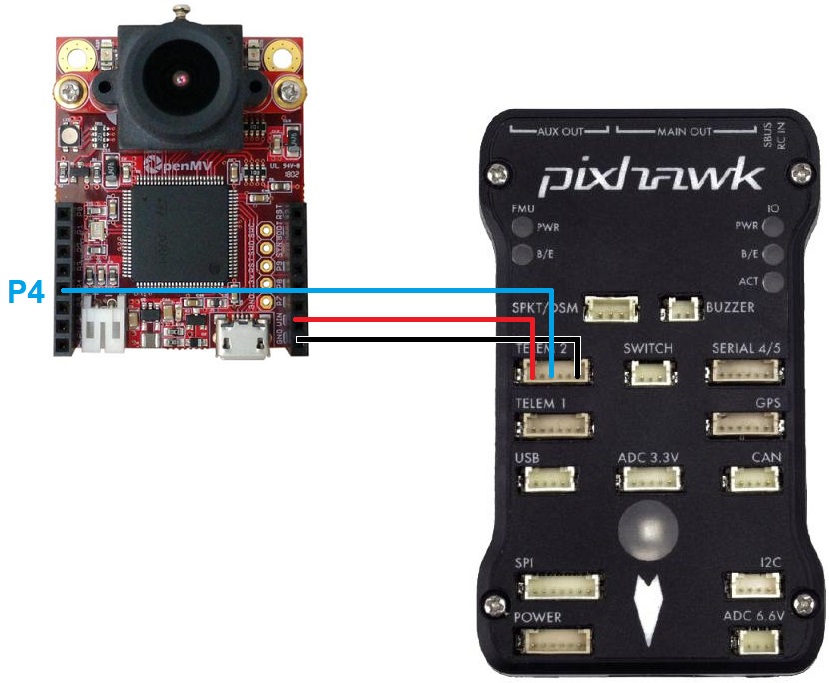 但是不知道怎么通讯 pixhawk怎么接收openmv的信息
但是不知道怎么通讯 pixhawk怎么接收openmv的信息