我在安装OPENMV的时候,弹出了如截图的错误,以管理员身份运行也没有用。我之前OPENMV运行出现问题,删除过一次,电脑里已经删除干净了,之后就再也没有成功安装过。
还请各位大佬不吝赐教。

我在安装OPENMV的时候,弹出了如截图的错误,以管理员身份运行也没有用。我之前OPENMV运行出现问题,删除过一次,电脑里已经删除干净了,之后就再也没有成功安装过。
还请各位大佬不吝赐教。
@kidswong999
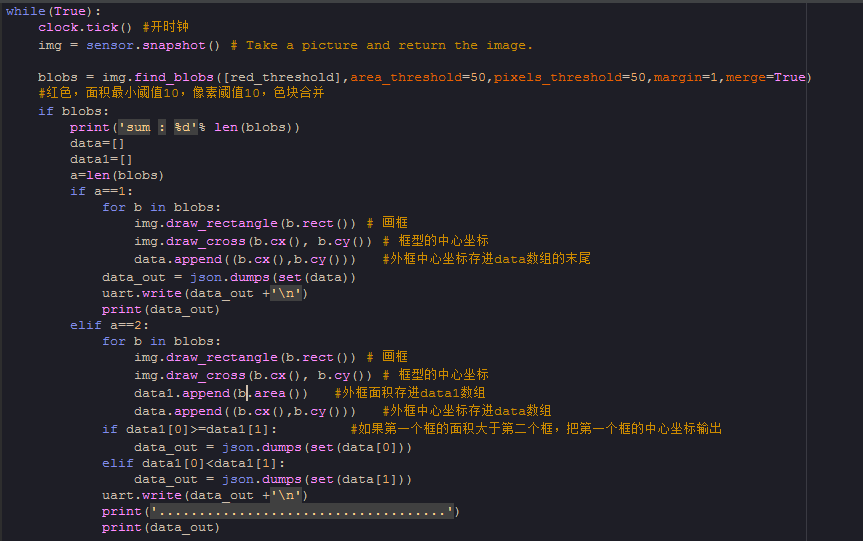
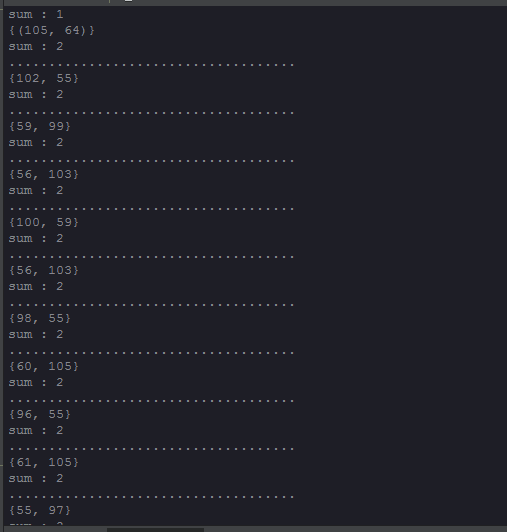
我把摄像头和检测物体都固定位置,放在一个x大于y的位置,他就会有时先输出小一些的数,那就是反了吧?今天被莫名其妙的解决了。我无意间发现,output=json.dumps([b.cx(),b.cy()]) 输出是正常的,但是如果换成output=json.dumps({b.cx(),b.cy()}) 他的输出就会出现我前文描述的问题。这是为什么呢?
@kidswong999 小智智,能不能把我20天前上传的这个问题看一下呢?我急用,谢谢了。
我在用OPEN MV做一个寻找色块的小项目,要求只输出区域面积最大的框形坐标,当两个框进行比较的时候,已经能找到面积最大的框。但是本来应该是输出(x,y)的,有时候会输出(y,x),这是什么情况?求大佬解释
Insert Code Here
#寻找红色色块并输出中心点坐标
import sensor, image, time
import json
from pyb import UART
red_threshold = ((85, 17, 81, 4, -19, 39))
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
uart = UART(3, 115200)
i=0
m=20 #在40帧的情况下,每0.5秒输给串口一次数据
while(True):
clock.tick() #开时钟
img = sensor.snapshot() # Take a picture and return the image.
if i==m:
i=0
elif i<m:
i=i+1
blobs = img.find_blobs([red_threshold],area_threshold=50,pixels_threshold=50,margin=1,merge=True)
#红色,面积最小阈值10,像素阈值10,色块合并
if blobs:
print('sum : %d'% len(blobs))
data=[]
data1=[]
a=len(blobs)
if a==1:
for b in blobs:
img.draw_rectangle(b.rect()) # 画框
img.draw_cross(b.cx(), b.cy()) # 框型的中心坐标
data.append((b.cx(),b.cy())) #外框中心坐标存进data数组的末尾
data_out = json.dumps(set(data))
if i==m:
uart.write(data_out +'\n')
print(data_out)
elif a==2:
for b in blobs:
img.draw_rectangle(b.rect()) # 画框
img.draw_cross(b.cx(), b.cy()) # 框型的中心坐标
data1.append(b.area()) #外框面积存进data1数组
data.append((b.cx(),b.cy())) #外框中心坐标存进data数组
if data1[0]>=data1[1]: #如果第一个框的面积大于第二个框,把第一个框的中心坐标输出
data_out = json.dumps(set(data[0]))
elif data1[0]<data1[1]:
data_out = json.dumps(set(data[1]))
if i==m:
uart.write(data_out +'\n'))
print(data_out)