模板匹配算法如何每隔三秒检测一次
1
13331763481 发布的帖子
-
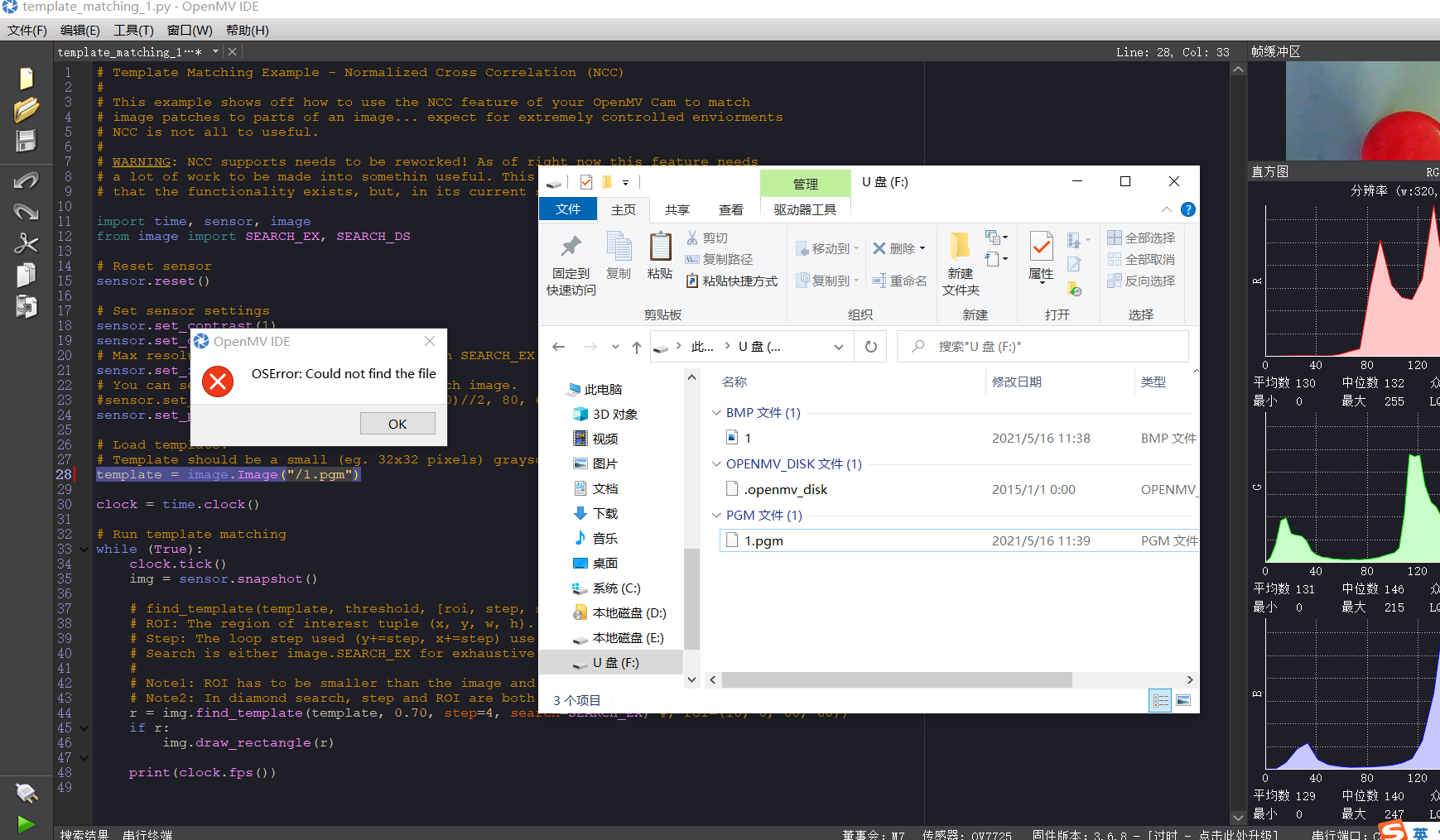
LCD为什么和模板匹配算法一起使用一照到东西就白屏发布在 OpenMV Cam
from pyb import Pin from image import SEARCH_EX, SEARCH_DS # Reset sensor sensor.reset() # Set sensor settings sensor.set_contrast(1) sensor.set_gainceiling(16) # Max resolution for template matching with SEARCH_EX is QQVGA sensor.set_framesize(sensor.QQVGA) # You can set windowing to reduce the search image. #sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60)) sensor.set_pixformat(sensor.GRAYSCALE) # Load template. # Template should be a small (eg. 32x32 pixels) grayscale image. template = image.Image("10.pgm") lcd.init() clock = time.clock() uart = UART(3, 9600) while(True): #uart.write("Hello World!\r") #p1_out.high() lcd.display(sensor.snapshot()) clock.tick() img = sensor.snapshot() r = img.find_template(template, 0.70, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) #find_template(template, threshold, [roi, step, search]),threshold中 #的0.7是相似度阈值,roi是进行匹配的区域(左上顶点为(10,0),长80宽60的矩形), #注意roi的大小要比模板图片大,比frambuffer小。 #把匹配到的图像标记出来 if r: img.draw_rectangle(r) p3_out = Pin('P7', Pin.OUT_PP) p3_out.low() time.sleep_ms(1000) p3_out.high() uart.write("Hello World!\r") print(clock.fps()) if uart.any(): a=uart.readline().decode().strip() print(a) if a == '1': p1_out = Pin('P1', Pin.OUT_PP) p1_out.low() time.sleep_ms(1000) p1_out.high() uart.write("Hello World!\r") if a=='2': uart.write("Hello ") p2_out = Pin('P2', Pin.OUT_PP) p2_out.low() time.sleep_ms(1000) p2_out.high() if a=='4': uart.write("Hello") p4_out = Pin('P0', Pin.OUT_PP) p4_out.low() time.sleep_ms(1000) p4_out.high() -
同时识别圆形和矩形为啥通电后不好使 啊发布在 OpenMV Cam
import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster (160x120 max on OpenMV-M7) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # 下面的`threshold`应设置为足够高的值,以滤除在图像中检测到的具有 # 低边缘幅度的噪声矩形。最适用与背景形成鲜明对比的矩形。 for r in img.find_rects(threshold = 10000): img.draw_rectangle(r.rect(), color = (255, 0, 0)) for p in r.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) print(r) img1 = sensor.snapshot().lens_corr(1.8) for c in img1.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 100, r_step = 2): area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r()) #area为识别到的圆的区域,即圆的外接矩形框 statistics = img1.get_statistics(roi=area)#像素颜色统计 print(statistics) #(0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。 #l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 0<statistics.l_mode()<100 and 0<statistics.a_mode()<127 and 0<statistics.b_mode()<127:#if the circle is red img.draw_rectangle(area, color = (255, 255, 255))#识别到的红色圆形用红色的圆框出来 elif 30<statistics.l_mode()<100 and -64<statistics.a_mode()<-8 and -32<statistics.b_mode()<32:#if the circle is red img.draw_rectangle(area, color = (255, 255, 255))#识别到的红色圆形用红色的圆框出来 elif 0<statistics.l_mode()<15 and 0<statistics.a_mode()<-40 and -80<statistics.b_mode()<-20:#if the circle is red img.draw_rectangle(area, color = (255, 255, 255))#识别到的红色圆形用红色的圆框出来 print("FPS %f" % clock.fps()) -
怎么利用PCA9685使不同的小灯亮啊 比如说识别到红色第一个灯亮识别到蓝色第二个灯亮 能分享一下代码嘛发布在 OpenMV Cam
怎么利用PCA9685使不同的小灯亮啊 比如说识别到红色第一个灯亮识别到蓝色第二个灯亮 能分享一下代码嘛
-
RE: 如何利用pca9685分别连接6个LED小灯 如何接线啊发布在 OpenMV Cam
怎么根据识别不同的颜色让不同的小灯亮啊,比如说 识别到红色第一个灯亮 识别蓝色第二个灯亮 能分享一下参考代码嘛