@kidswong999
那为什么我用两种方法得到的结果不一样呢?
1
13202368306 发布的帖子
-
使用舵机拓展例程15时遇到无法驱动舵机的问题发布在 OpenMV Cam
import time from machine import I2C, Pin #from pyb import I2C #i2c = I2C(2, I2C.MASTER) # The i2c bus must always be 2. #print(i2c.scan()) i2c = I2C(sda=Pin('P5'), scl=Pin('P4')) print(i2c.scan())如果使用pyb库的scan方法 , 返回空的列表
如图

如果使用machine 库的scan方法 , 返回全部地址 ,但是我只连接了一个 PCA9685
如图

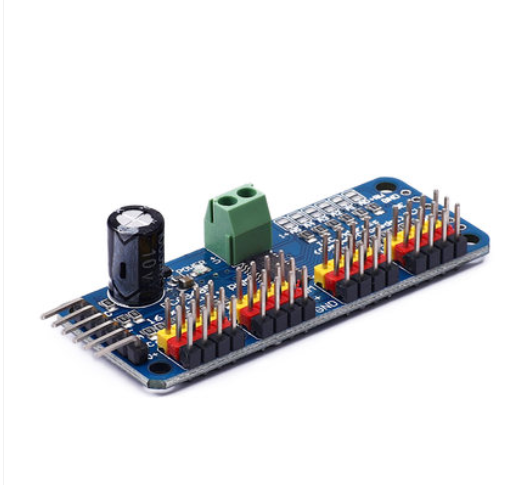
PCA9685我用的是这款
如图
如果直接运行例程中的main 没有报错 但是舵机无法转动 ,也没有产生PWM波
舵机我用的是 MG995 检测PWM的方法是 L298N+ 小马达
外接了一个5v电源 -
可能是上手教程里寻球小车代码的bug?发布在 OpenMV Cam
# Blob Detection Example # # This example shows off how to use the find_blobs function to find color # blobs in the image. This example in particular looks for dark green objects. import sensor, image, time import car from pid import PID # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... green_threshold = (76, 96, -110, -30, 8, 66) size_threshold = 2000 x_pid = PID(p=0.5, i=1, imax=100) h_pid = PID(p=0.05, i=0.1, imax=50) def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([green_threshold]) if blobs: max_blob = find_max(blobs) x_error = max_blob[5]-img.width()/2 h_error = max_blob[2]*max_blob[3]-size_threshold print("x error: ", x_error) ''' for b in blobs: # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy ''' img.draw_rectangle(max_blob[0:4]) # rect img.draw_cross(max_blob[5], max_blob[6]) # cx, cy x_output=x_pid.get_pid(x_error,1) h_output=h_pid.get_pid(h_error,1) print("h_output",h_output) car.run(-h_output-x_output,-h_output+x_output) else: car.run(18,-18)上一段代码中的
def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob需要添加‘’global max_blob''一句 否则在反复接收函数值时会报错
具体参考https://www.cnblogs.com/zhaijiahui/p/8398480.html