我们用了8种物品大小差距比较大,颜色也不宜。物品太小,摄像头识别不是很清楚,物品太大,摄像头看不全。如何提高识别精度。
R
rvwk
@rvwk
0
声望
14
楼层
935
资料浏览
0
粉丝
1
关注
rvwk 发布的帖子
-
如何提高神经网络训练精度,训练15种物品,大大小小,颜色各一的物品。发布在 OpenMV Cam
-
垃圾分类,用的神经网络训练出来的代码,怎么跟舵机配合,使得识别到指定垃圾转动指定角度发布在 OpenMV Cam
# Edge Impulse - OpenMV Image Classification Example import sensor, image, time, os, tf from pyb import Servo import time sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240, 240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. s1 = Servo(1) s2 = Servo(2) net = "trained.tflite" labels = [line.rstrip('\n') for line in open("labels.txt")] n = 0 clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # default settings just do one detection... change them to search the image... for obj in tf.classify(net, img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5): print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect()) img.draw_rectangle(obj.rect()) #我知道写控制舵机的语句在这些,我分了11个类,我想知道当openmv识别到指定垃圾时,程序根据哪个变量来知道识别 #的是哪种垃圾,因为我需要根据识别到的垃圾类型,来控制舵机转到相应的角度 # This combines the labels and confidence values into a list of tuples predictions_list = list(zip(labels, obj.output())) for i in range(len(predictions_list)): print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) print(clock.fps(), "fps") -
OSError:IErno 2] ENOENT发布在 OpenMV Cam
# Edge Impulse - OpenMV Image Classification Example import sensor, image, time, os, tf sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240, 240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. net = "trained.tflite" labels = [line.rstrip('\n') for line in open("labels.txt")] clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # default settings just do one detection... change them to search the image... for obj in tf.classify(net, img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5): print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect()) img.draw_rectangle(obj.rect()) # This combines the labels and confidence values into a list of tuples predictions_list = list(zip(labels, obj.output())) for i in range(len(predictions_list)): print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) print(clock.fps(), "fps")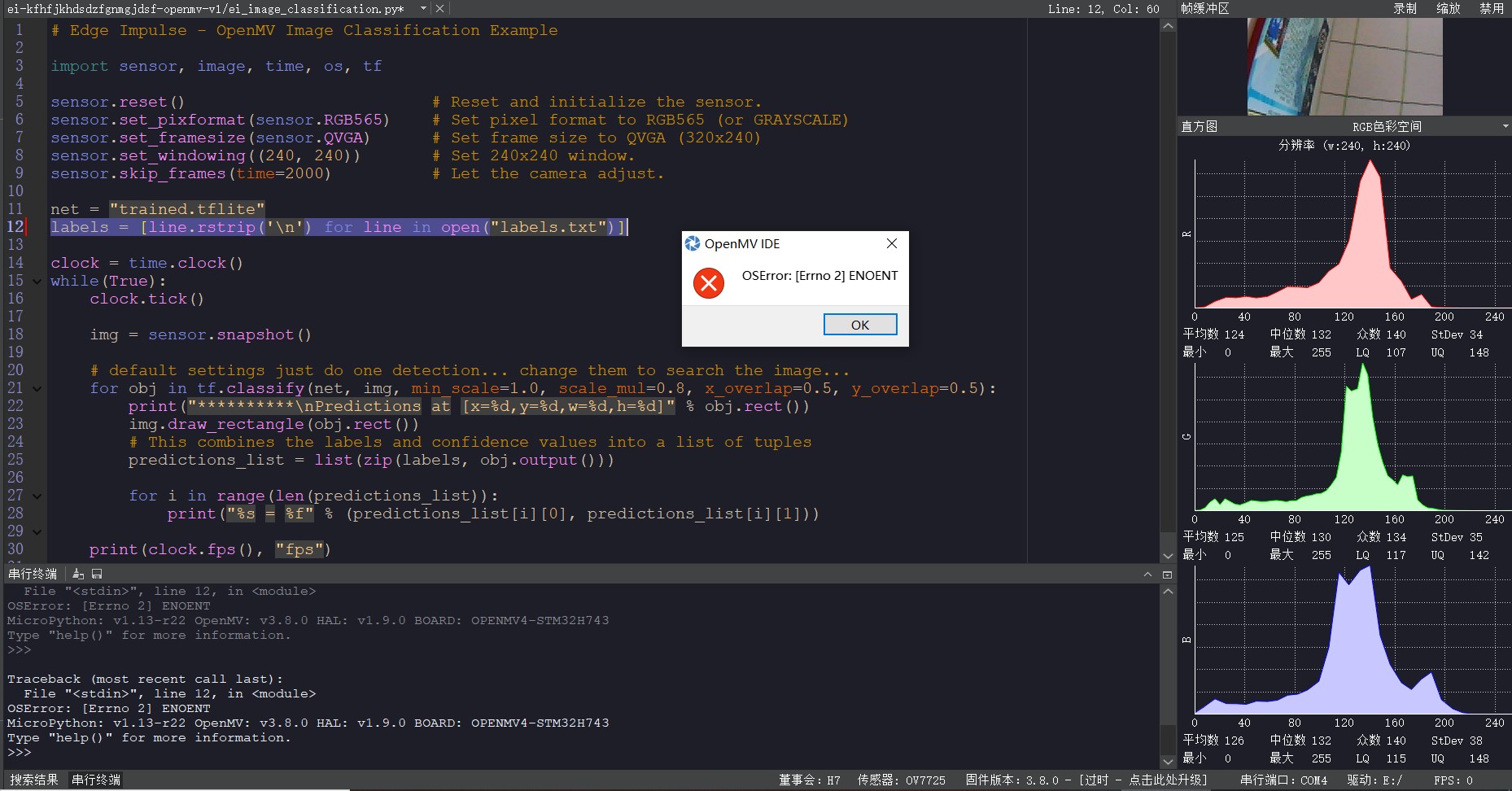
-
openmv4 H7plus烧录了openmv2的固件,现在电脑检测不到openmv的存在发布在 OpenMV Cam
因为最新4.0.0的固件bug,我去烧了以往的固件版本,误烧了openmv2的挂件版本,导致现在电脑检测不到openmv的存在,同时也烧不进3.9.4的版本,烧3.9.4时一直卡在49%的进度,用的DFU模式烧录