@kidswong999 改成320* 0.5和240 * 0.5,那70和71行是不是也要改啊?
F
fr5c
@fr5c
0
声望
25
楼层
1293
资料浏览
0
粉丝
1
关注
fr5c 发布的帖子
-
RE: OpenMV H4 Plus 输出的Apritag位置信号偏差很大发布在 OpenMV Cam
-
RE: OpenMV H4 Plus 输出的Apritag位置信号偏差很大发布在 OpenMV Cam
@kidswong999
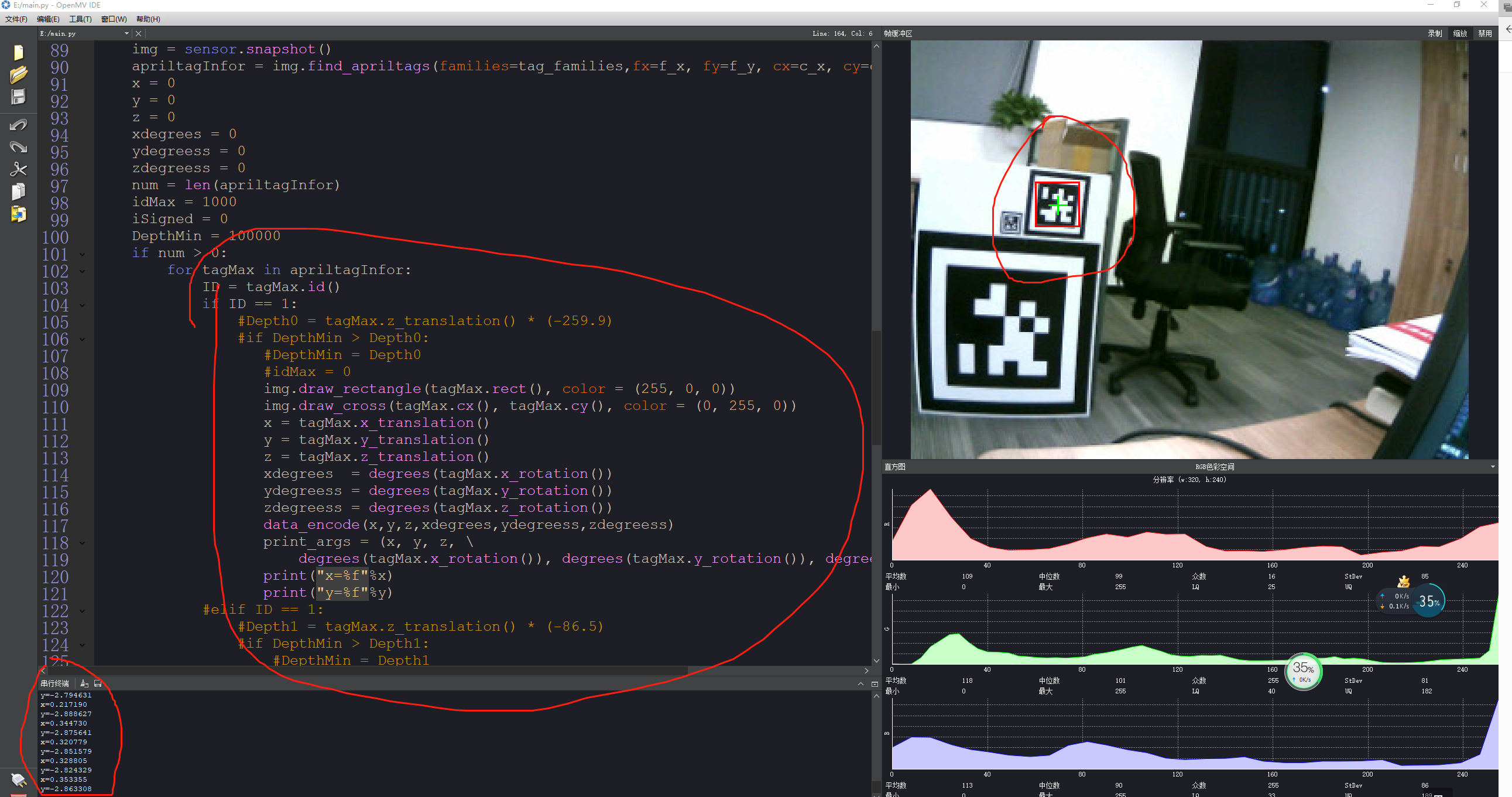
apritag明显不在中间,输出的x的值约等于0,这偏差这么大
什么原因,我买了几块板子都是这样。 -
RE: OpenMV H4 Plus 输出的Apritag位置信号偏差很大发布在 OpenMV Cam
请在这里粘贴代码 ```就是运行代码,您这偏差这么大,什么情况?我买了几块这样的板子,都是这样的 -
RE: OpenMV H4 Plus 输出的Apritag位置信号偏差很大发布在 OpenMV Cam
import sensor, image, time,mjpeg, math,pyb,tv from struct import pack , unpack sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) tv.init() tv.channel(8) clock = time.clock() uart = pyb.UART(3, 115200, timeout_char = 1000) packet_sequence = 0 flag = False n = 0; def checksum(data, extra): output = 0xFFFF for i in range(len(data)): tmp = data[i] ^ (output & 0xFF) tmp = (tmp ^ (tmp << 4)) & 0xFF output = ((output >> 8) ^ (tmp << 8) ^ (tmp << 3) ^ (tmp >> 4)) & 0xFFFF tmp = extra ^ (output & 0xFF) tmp = (tmp ^ (tmp << 4)) & 0xFF output = ((output >> 8) ^ (tmp << 8) ^ (tmp << 3) ^ (tmp >> 4)) & 0xFFFF return output def set_position_target_local_ned_send(time_boot_ms, target_system, target_component, coordinate_frame, type_mask, x, y, z, vx, vy, vz, afx, afy, afz, yaw, yaw_rate, force_mavlink1=False): seq = 0xb global packet_sequence tmp=pack("<5BIfffffffffffHBBB",0x35,packet_sequence,target_system, target_component,0x54,time_boot_ms,x,y,z,vx,vy,vz,afx, afy, afz, yaw, yaw_rate,type_mask,0, 0, coordinate_frame) crc = checksum(tmp,143) tmp= pack("<b58sh",0xfe,tmp,crc) packet_sequence += 1 uart.write(tmp) def command_long_send( target_system, target_component, yaw): sign = 1 if yaw<0: sign=-1 yaw=-yaw seq = 0xe global packet_sequence tmp=pack("<5BfffffffHBBB",0x21,seq,target_system, target_component,0x4c,yaw,0,sign,1,0,0,0,0x73,0, 0) crc = checksum(tmp,152) tmp= pack("<b38sh",0xfe,tmp,crc) packet_sequence += 1 uart.write(tmp) def data_encode(x,y,z,roll,pitch,yaw): global flag flag = not flag if flag: set_position_target_local_ned_send( 0, 0xff, 0, 8, 0xdf8, x,y,z, roll,pitch,yaw, 0, 0, 0, 0, 0.9) else: if yaw>180: yaw=yaw-360 if yaw >5: yaw = 5 elif yaw<-5: yaw = -5 else: yaw = 0 command_long_send( 0xff, 0, yaw) f_x = (2.8 / 3.6736) * 160 f_y = (2.8 / 2.7384) * 120 c_x = 160 * 0.5 c_y = 120 * 0.5 Depth = 10000000 tag_families = 0 tag_families |= image.TAG36H11 m = mjpeg.Mjpeg("example.mjpeg") def family_name(tag): if(tag.family() == image.TAG36H11): return 112 valid_tag_ids = { 0 : 432, 1 : 144, 2 : 48, } def degrees(radians): return (180 * radians) / math.pi while(True): clock.tick() img = sensor.snapshot() n = n + 1 apriltagInfor = img.find_apriltags(families=tag_families,fx=f_x, fy=f_y, cx=c_x, cy=c_y) x = 0 y = 0 z = 0 xdegrees = 0 ydegreess = 0 zdegreess = 0 num = len(apriltagInfor) idMax = 1000 iSigned = 0 DepthMin = 100000 if num > 0: for tagMax in apriltagInfor: ID = tagMax.id() if ID == 0: Depth0 = tagMax.z_translation()*(-512.4) if DepthMin > Depth0: DepthMin = Depth0 idMax = 0 elif ID == 1: Depth1 = tagMax.z_translation() * (-165.5) #print("D=%f"%Depth1) if DepthMin > Depth1: DepthMin = Depth1 idMax = 1 elif ID == 2: Depth2 = tagMax.z_translation() * (-53.3) #Depth3 = tagMax.x_translation() * (1) #Depth4 = tagMax.y_translation() * (1) #print("x=%f"%Depth3) #print("y=%f"%Depth4) if DepthMin > Depth2: DepthMin = Depth2 idMax = 2 if (DepthMin - Depth > 200 or Depth > DepthMin): Depth = DepthMin if num > 0: for tag in apriltagInfor: ID = tag.id() if Depth > 3000: if ID == 0: img.draw_rectangle(tag.rect(), color = (255, 0, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) x = tag.x_translation() * (-104.9)#-180 y = tag.y_translation() * (-108.7)#-190.3 z = tag.z_translation() * (-512.4)#-259.9 xdegrees = degrees(tag.x_rotation()) ydegreess = degrees(tag.y_rotation()) zdegreess = degrees(tag.z_rotation()) data_encode(x,y,z,xdegrees,ydegreess,zdegreess) print_args = (x, y, z, \ degrees(tag.x_rotation()), degrees(tag.y_rotation()), degrees(tag.z_rotation())) else: img.draw_rectangle(tag.rect(), color = (0, 255, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 0, 255)) elif(Depth <= 3000) and (Depth > 800): if ID == 1: img.draw_rectangle(tag.rect(), color = (255, 0, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) x = tag.x_translation() * (-33.4)#-180 y = tag.y_translation() * (-36.5)#-86.6 z = tag.z_translation() * (-165.5)#104 xdegrees = degrees(tag.x_rotation()) ydegreess = degrees(tag.y_rotation()) zdegreess = degrees(tag.z_rotation()) data_encode(x,y,z,xdegrees,ydegreess,zdegreess) print_args = (x, y, z, \ degrees(tag.x_rotation()), degrees(tag.y_rotation()), degrees(tag.z_rotation())) else: img.draw_rectangle(tag.rect(), color = (0, 255, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 0, 255)) elif(Depth <= 800): if ID == 2: img.draw_rectangle(tag.rect(), color = (255, 0, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) x = tag.x_translation() * (-11.6)#-180 y = tag.y_translation() * (-11.8)#-190.3 z = tag.z_translation() * (-53.3)#-28.9 xdegrees = degrees(tag.x_rotation()) ydegreess = degrees(tag.y_rotation()) zdegreess = degrees(tag.z_rotation()) data_encode(x,y,z,xdegrees,ydegreess,zdegreess) print_args = (x, y, z, \ degrees(tag.x_rotation()), degrees(tag.y_rotation()), degrees(tag.z_rotation())) else: img.draw_rectangle(tag.rect(), color = (0, 255, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 0, 255)) tv.display(img) if n <=10000: m.add_frame(img) if n == 10000: m.close(clock.fps()) #print("n = %d"%n) #print(clock.fps()) 输出的位置信息和实际的位置信息偏差很大 -
OpenMV H4 Plus 输出的Apritag位置信号偏差很大发布在 OpenMV Cam
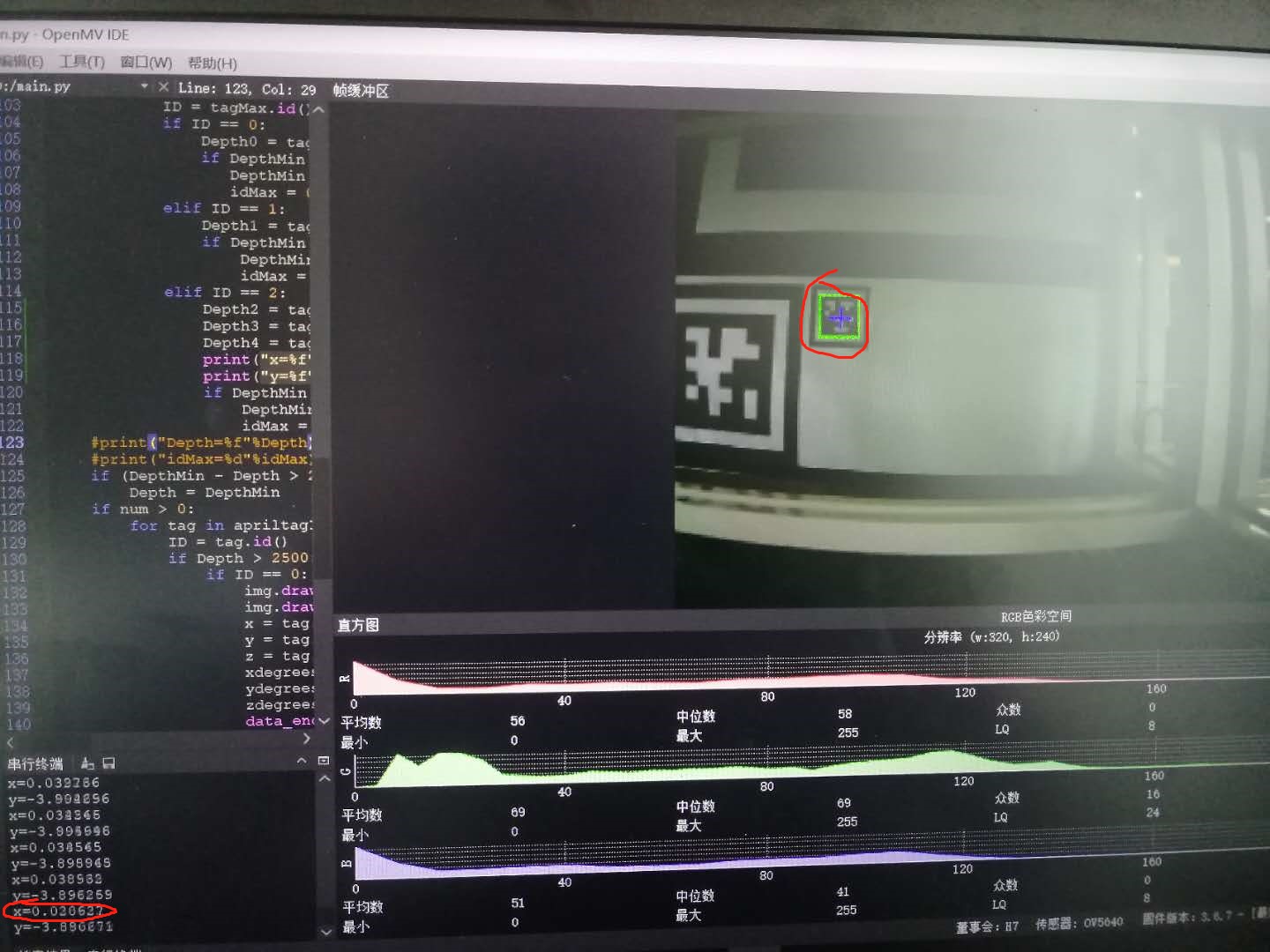
上图红色框分别是识别到的Apritag,及他输出的x,感觉x和实际Apritag在图像中的位置偏差很大啊 -
RE: OpenMV上的串口TX和RX和哪些pin是连在一起的啊?我想使用线把TX和RX与其他设备的RX和TX相连发布在 OpenMV Cam
@fr5c USB接口的TX和RX,说错了,是usb不是串口
-
OpenMV上的串口TX和RX和哪些pin是连在一起的啊?我想使用线把TX和RX与其他设备的RX和TX相连发布在 OpenMV Cam
OpenMV上的串口TX和RX和哪些pin是连在一起的啊?我想使用线把TX和RX与其他设备的RX和TX相连
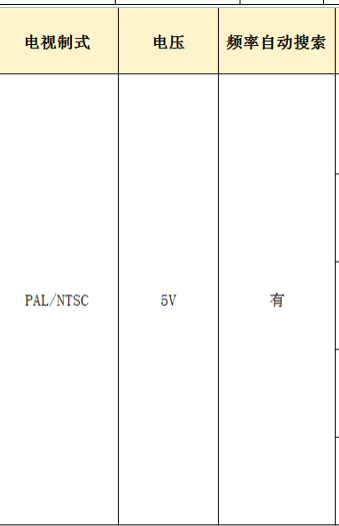 ,这是别人的接收器的参数,为啥接收不了啊?
,这是别人的接收器的参数,为啥接收不了啊?