那如果我想自己编写一个防抖的算法,用什么算法比较合适,能简单推荐一个比较好的算法让我去学习吗?
H
h3gn
@h3gn
0
声望
14
楼层
1509
资料浏览
0
粉丝
0
关注
h3gn 发布的帖子
-
Openmv4的防抖算法发布在 OpenMV Cam
Openmv4可以自己添加或者有现成的防抖算法吗?
可以自己添加防抖算法,有什么算法比较推荐学习呢?这方面不是很了解。
需要将摄像头装在船上,希望可以在船上获得稳定图像。 -
RE: 和Arduino串口通信不对,发布在 OpenMV Cam
@kidswong999 在 和Arduino串口通信不对, 中说:
Serial.readString()
void setup() { // put your setup code here, to run once: Serial.begin(19200); pinMode(0,INPUT); pinMode(1,OUTPUT); } void loop() { // put your main code here, to run repeatedly: Serial.print(Serial.readString()); delay(1000); }您好,更改之后发现串口没有任何显示,波特率没有问题,怎么破呢?非常感谢
-
和Arduino串口通信不对,发布在 OpenMV Cam
Openmv代码
# Untitled - By: lenovo - 周五 5月 3 2019 import sensor, image, time from pyb import UART sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) uart = UART(3,19200) uart.init(19200,bits=8,parity=None,stop=1) clock = time.clock() while(True): clock.tick() img = sensor.snapshot() print(clock.fps()) uart.write("hello world") time.sleep(1000)Aduino代码
void setup() { // put your setup code here, to run once: Serial.begin(19200); pinMode(0,INPUT); pinMode(1,OUTPUT); } void loop() { // put your main code here, to run repeatedly: Serial.print(Serial.read()); delay(1000); }
求助,不知道为什么串口读出来不对。 -
RE: 追小球的小车那里,控制电机那用ch1,ch2什么意思,就是这是如何实现电机的调速?发布在 OpenMV Cam
@kidswong999 其实我就是不明白这里给电机的电压的引脚是P0 P1但是给PWM的引脚是P7,如果这个电机只有两根线,一个电源线一个地线,那这是怎么控制的呢?
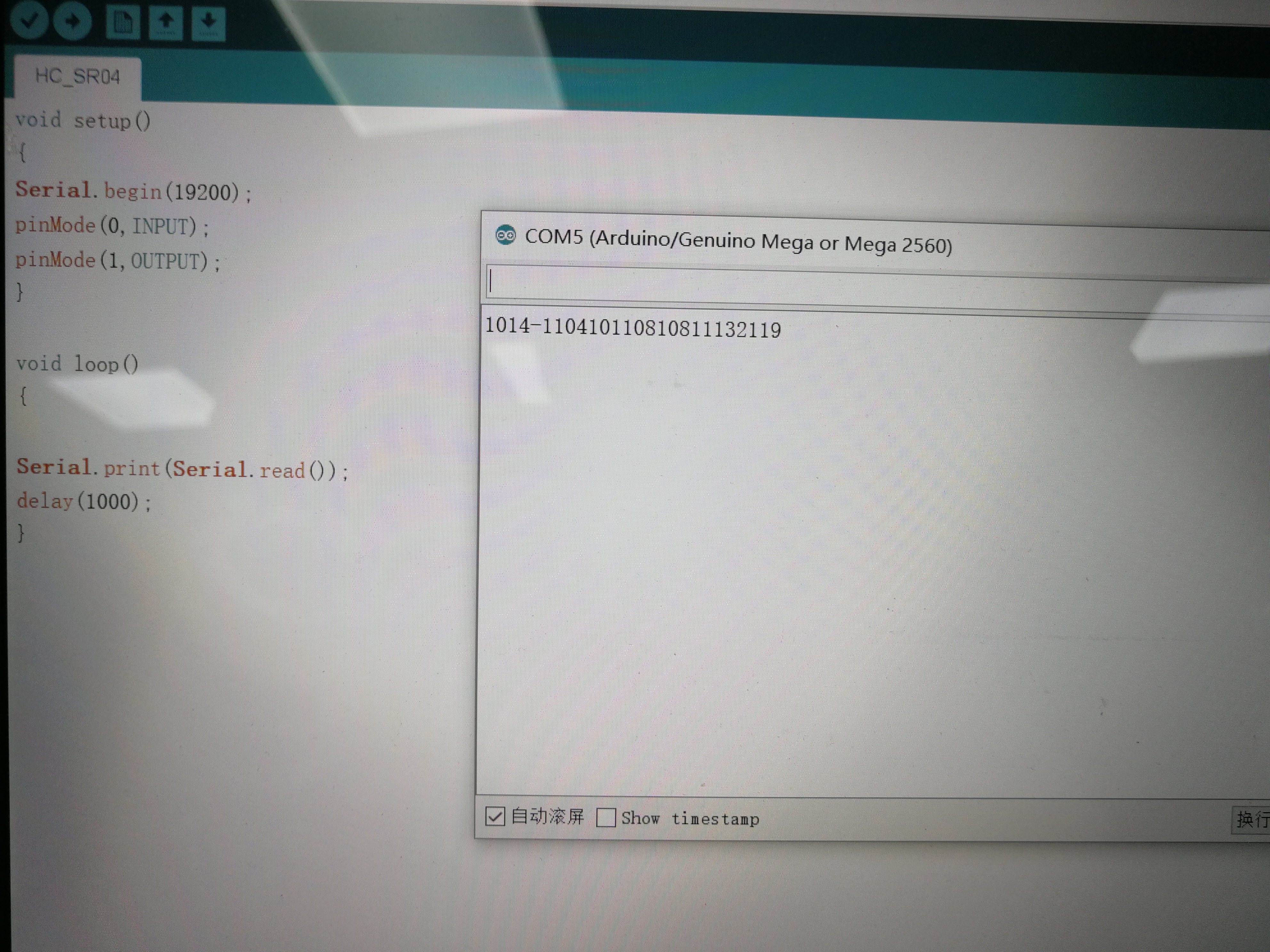 结果如下,求助
结果如下,求助