传递过来的数据是‘L\n’
I
igxs
@igxs
0
声望
6
楼层
3180
资料浏览
0
粉丝
0
关注
igxs 发布的帖子
-
串口接收数据,程序只执行一下子,openmv直接卡死,报错发布在 OpenMV Cam
import sensor, image, time from pyb import UART sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.skip_frames(time = 2000) # Wait for settings take effect. clock = time.clock() # Create a clock object to track the FPS. uart = UART(3, 115200) a=0 while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() # Take a picture and return the image. print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected # to the IDE. The FPS should increase once disconnected. #code = 'A' #print(code) #uart.write(code) if uart.any(): recieve = uart.readline().decode().strip() print(recieve) if recieve == 'L': print("We win.") a=a+1 print(a) print("\n") else: print("No FOUND")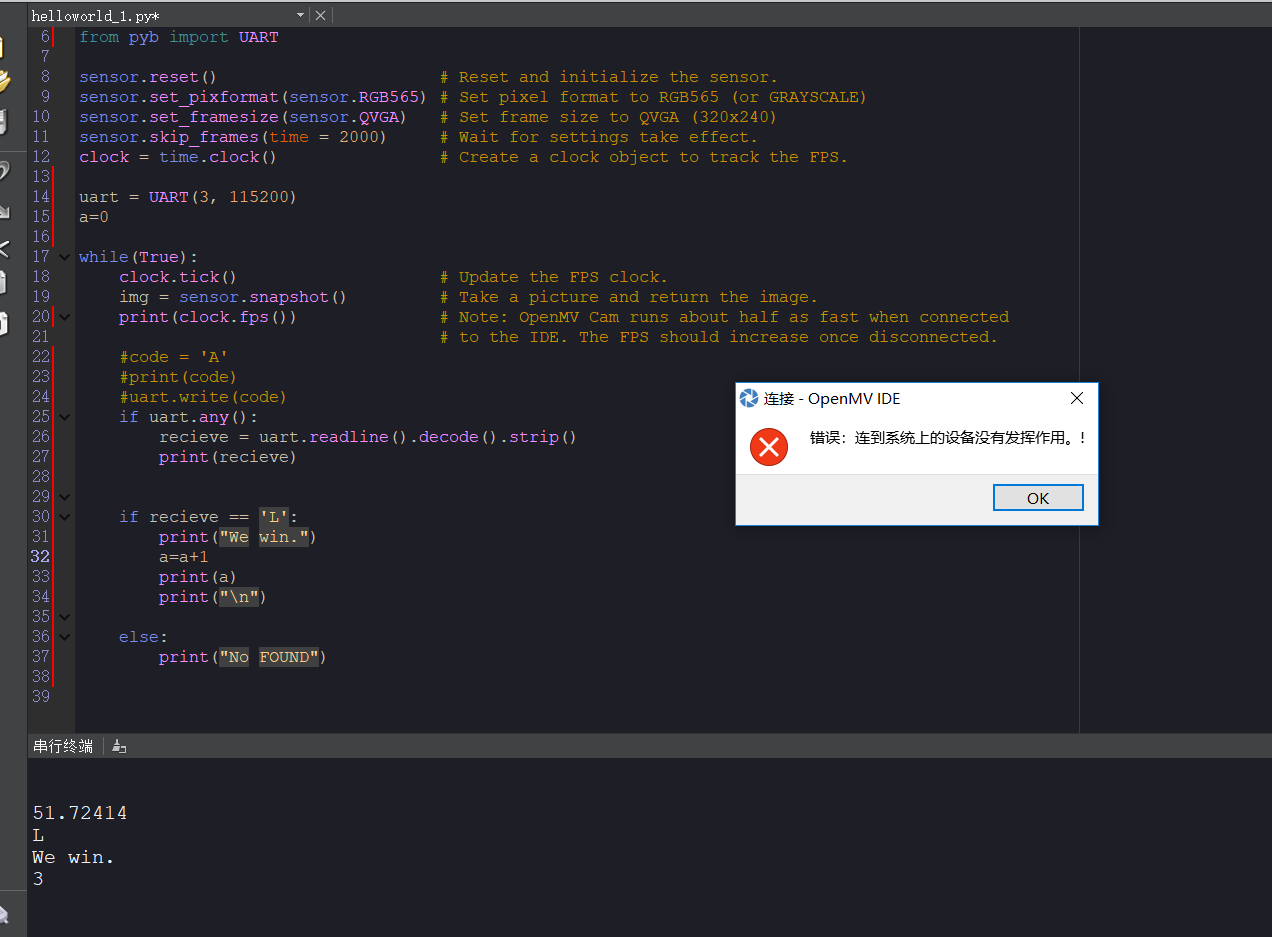
-
RE: 串口卡死?发布在 OpenMV Cam
我也出现了同样的问题,就是openmv接收了几次STM32的数据后,卡在上面不动了,然后自动就弹出来了,需要拔掉USB线重新跑程序,但是也只能接收一会
-
openmv如何通过wifi或者蓝牙传输图像?发布在 OpenMV Cam
比如,我openmv拍摄图像存在内存卡里面,然后通过wifi或蓝牙传输到另外一个蓝牙或者wifi端,传输完成后让内存卡里面的图片删除,怎么实现呢?
python里面有没有写好的图片传输的库? -
有人用otsu算法 ,做过阈值分割不?这样对环境要求是不是能降低?发布在 OpenMV Cam
opencv程序能不能移植到mv上面来呢?
https://blog.csdn.net/timidsmile/article/details/8493468
otsu法(最大类间方差法,有时也称之为大津算法)使用的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最大,每个部分之间的灰度差异最小,通过方差的计算来寻找一个合适的灰度级别 来划分。 所以 可以在二值化的时候 采用otsu算法来自动选取阈值进行二值化。otsu算法被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响。因此,使类间方差最大的分割意味着错分概率最小。链接文本