我在多文件编程时遇到了问题,求解答
-
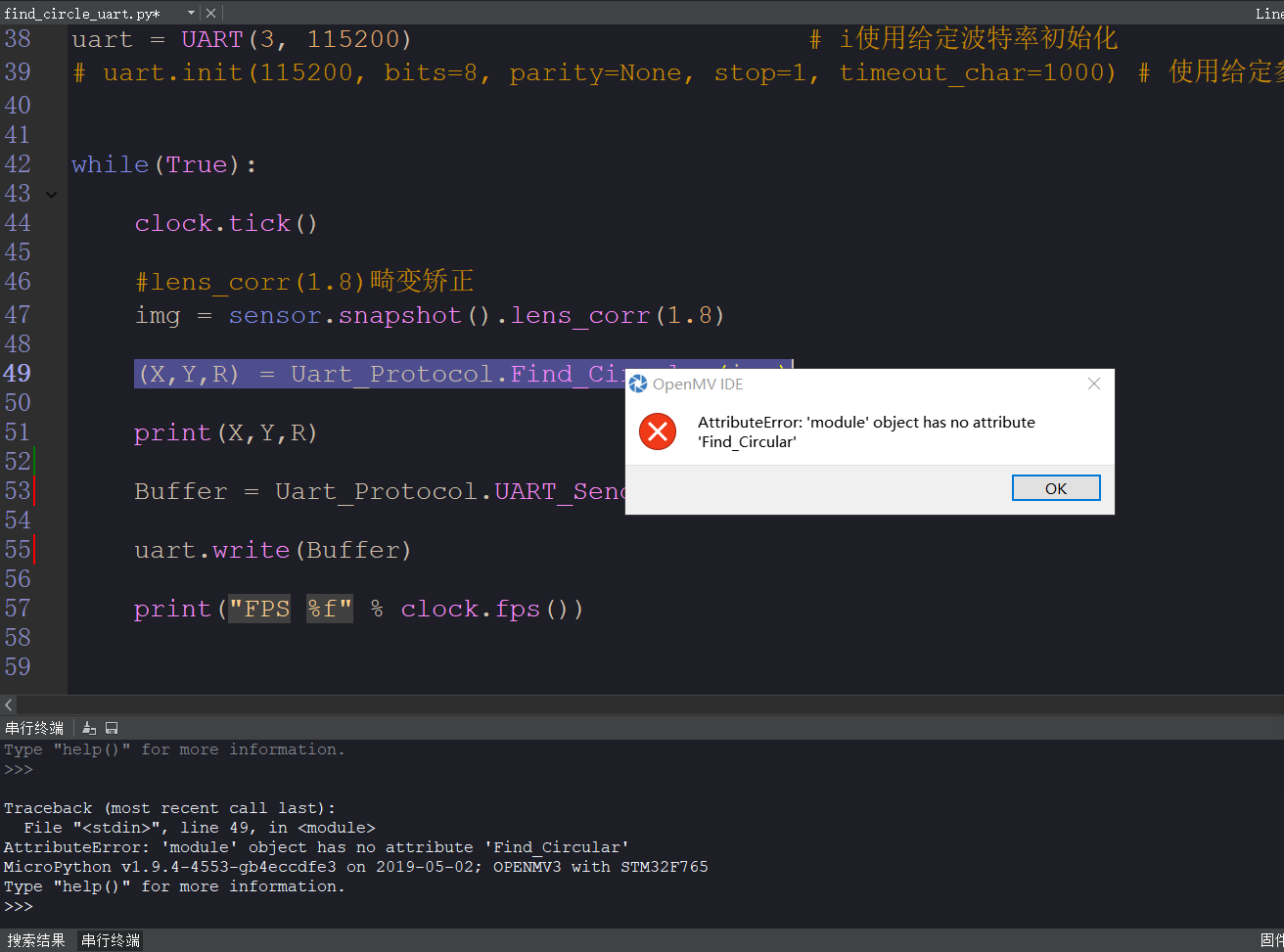
我在多文件编程时,想在find_circle_uart.py中调用Uart_Protocol.py时,遇到问题AttributeError:' module' object has no attribute ' Find Circular',应该怎么解决?
问题截图:
代码如下:
Uart_Protocol.py:import sensor, image, time def ExceptionVar(var): data = [] data.append(0) data.append(0) if var == -1: data[0] = 0 data[1] = 0 else: data[0] = var & 0xFF data[1] = var >> 8 return data Frame_Cnt = 0 fCnt_tmp = [0,0] # FormType : 所识别的形状 Ps: 0: Cricle -> 圆心坐标 -> 半径 # 1: Rectangle -> 中心坐标 -> # 2: Lines -> 端点坐标(靠近(0,0)) -> 角度 # 3: LineSegment -> 端点坐标 -> 角度angle # FormType_X,FormType_Y : 坐标 # FormType_Other : 其他 def UART_Send(FormType, FormType_X, FormType_Y, FormType_Other): global Frame_Cnt global fCnt_tmp Frame_Head = [170,170] Frame_End = [85,85] fFormType_tmp = [FormType] Frame_Cnt += 1 if Frame_Cnt > 65534 : FrameCnt = 0 fHead = bytes(Frame_Head) fCnt_tmp[0] = Frame_Cnt & 0xFF fCnt_tmp[1] = Frame_Cnt >> 8 fCnt = bytes(fCnt_tmp) fFormType = bytes(fFormType_tmp) fFormType_X = bytes(ExceptionVar(FormType_X)) fFormType_Y = bytes(ExceptionVar(FormType_Y)) fFormType_Other = bytes(ExceptionVar(FormType_Other)) fEnd = bytes(Frame_End) FrameBuffe = fHead + fCnt + fFormType + fFormType_X + fFormType_Y + fFormType_Other + fEnd return FrameBuffefind_circle_uart.py:
# 识别圆形 # OpenMV识别图像中的圆形,并将圆形的坐标,半径通过串口 # 发送给MSP432. # 串口发送的数据结构参考中科浩电的巡线例程 import sensor, image, time, pyb import math import Uart_Protocol from pyb import UART from pyb import LED Led1 = pyb.LED(3) # 蓝灯 # Ps:pyb.LED(1):Red; pyb.LED(1):Green; pyb.LED(4):IR # 指示灯 def LED_flicker(): Led1.on() time.sleep(150) Led1.off() time.sleep(150) sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() uart = UART(3, 115200) # i使用给定波特率初始化 # uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000) # 使用给定参数初始化 while(True): clock.tick() #lens_corr(1.8)畸变矫正 img = sensor.snapshot().lens_corr(1.8) (X,Y,R) = Uart_Protocol.Find_Circular(img) print(X,Y,R) uart.write(Uart_Protocol.UART_Send_Circular(X,Y,R)) print("FPS %f" % clock.fps())