openmv和arduino数据传输的问题?求解决
-
这个是arduino接受数据的
int LED = 13; int i=0,p=0,m=0; void setup() { Serial.begin(115200);//模块上电灯快闪,arduino发送指令时需要按住模块上的按键 pinMode(LED,OUTPUT); } void loop() { char ch; ch = Serial.read(); Serial.print(ch); // if(ch=='C') // { // digitalWrite(LED,HIGH); // delay(100); // } delay(40); // digitalWrite(LED,LOW); }这个是openmv测距然后加了串口发送
# Measure the distance # # This example shows off how to measure the distance through the size in imgage # This example in particular looks for yellow pingpong ball. import sensor, image, time from pyb import UART uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... yellow_threshold = ( 56, 83, 5, 57, 63, 80) # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. K=5000#the value should be measured while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([yellow_threshold]) if len(blobs) == 1: # Draw a rect around the blob. b = blobs[0] img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy Lm = (b[2]+b[3])/2 length = K/Lm output_str="[%d,%d]" % (b[5],b[6]) #方式1 #output_str=json.dumps([max_blob.cx(),max_blob.cy()]) #方式2 uart.write(output_str+'\r\n') print(b[5],b[6]) #print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while # connected to your computer. The FPS should increase once disconnected.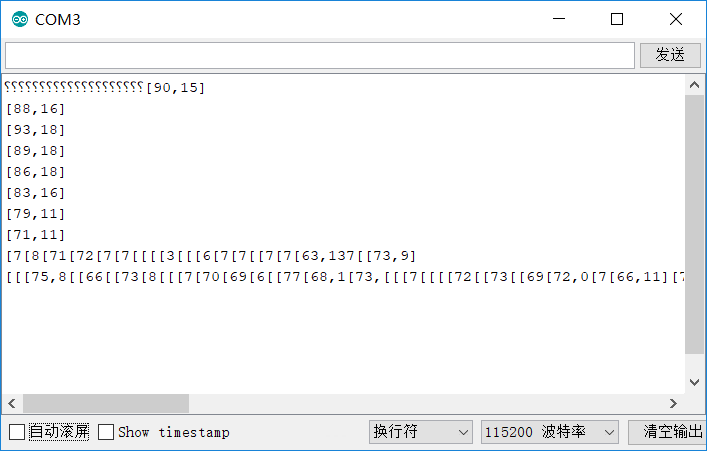
说明,问号是没有发送数据时的显示。问题:接受数据的前面的几个数据正常,为什么后面的就不对了?求解