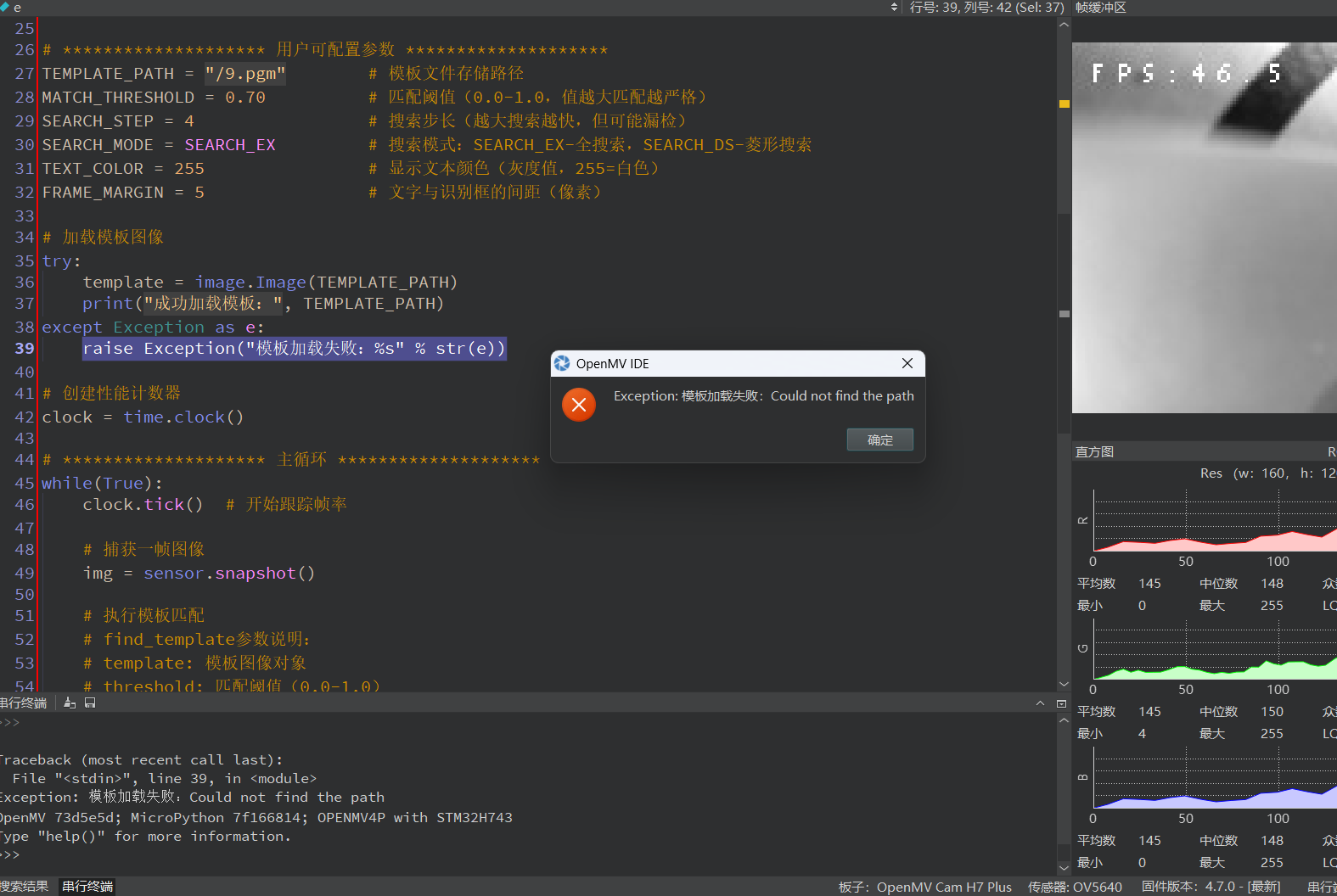
明明格式正确,路径也对,也是最新版本,模板加载失败是为什么?
-

请在这里粘贴代码模板匹配示例 - 归一化交叉相关算法(NCC)
功能增强说明:
1. 增加模板文件名显示在识别框上方
2. 添加识别结果输出功能
3. 优化代码结构并增加详细注释
import time
import sensor
import image
from image import SEARCH_EX, SEARCH_DS # 导入搜索模式常量******************** 系统初始化配置 ********************
初始化摄像头传感器
sensor.reset()
设置图像参数
sensor.set_contrast(1) # 对比度设置(范围0-3)
sensor.set_gainceiling(16) # 增益上限(防止过曝光)
sensor.set_framesize(sensor.QQVGA) # 设置分辨率160x120(NCC算法推荐分辨率)
sensor.set_pixformat(sensor.GRAYSCALE) # 使用灰度图模式(提升处理速度)摄像头安装方向校正(根据物理安装情况选择)
sensor.set_vflip(True) # 垂直翻转图像
sensor.set_hmirror(True) # 水平翻转图像******************** 用户可配置参数 ********************
TEMPLATE_PATH = "/9.pgm" # 模板文件存储路径
MATCH_THRESHOLD = 0.70 # 匹配阈值(0.0-1.0,值越大匹配越严格)
SEARCH_STEP = 4 # 搜索步长(越大搜索越快,但可能漏检)
SEARCH_MODE = SEARCH_EX # 搜索模式:SEARCH_EX-全搜索,SEARCH_DS-菱形搜索
TEXT_COLOR = 255 # 显示文本颜色(灰度值,255=白色)
FRAME_MARGIN = 5 # 文字与识别框的间距(像素)加载模板图像
try:
template = image.Image(TEMPLATE_PATH)
print("成功加载模板:", TEMPLATE_PATH)
except Exception as e:
raise Exception("模板加载失败:%s" % str(e))创建性能计数器
clock = time.clock()
******************** 主循环 ********************
while(True):
clock.tick() # 开始跟踪帧率# 捕获一帧图像 img = sensor.snapshot() # 执行模板匹配 # find_template参数说明: # template: 模板图像对象 # threshold: 匹配阈值(0.0-1.0) # roi: 感兴趣区域(x,y,w,h),默认全图搜索 # step: 搜索步长(越大越快,精度越低) # search: 搜索模式(SEARCH_EX或SEARCH_DS) result = img.find_template(template, MATCH_THRESHOLD, step=SEARCH_STEP, search=SEARCH_MODE) # 如果检测到目标 if result: # 解包匹配结果(x,y,w,h) x, y, w, h = result # 绘制识别框 img.draw_rectangle(result, color=TEXT_COLOR) # 在识别框上方显示文件名 # 计算文本位置:x坐标对齐框左侧,y坐标在框上方 text_x = x text_y = y - FRAME_MARGIN if y > FRAME_MARGIN else 0 img.draw_string(text_x, text_y, TEMPLATE_PATH.split('/')[-1], # 显示文件名 color=TEXT_COLOR, scale=0.5) # 通过输出识别结果 # 格式:检测时间(ms), 模板文件名, 坐标(x,y), 匹配相似度 # 注意:实际相似度需要从匹配结果中获取,当前固件暂不支持返回相似度值 print("[{:.0f}] 检测到模板: {}, 位置: ({},{})".format( time.ticks_ms(), TEMPLATE_PATH, x, y)) # 显示帧率(保留1位小数) fps = clock.fps() img.draw_string(5, 5, "FPS:%.1f" % fps, color=TEXT_COLOR) print("当前帧率:", fps)
-
把图片用文件夹装着,最好不要放在根目录如:“temp/9.pgm”(参考:https://book.openmv.cc/example/01-Camera/00-Snapshot/snapshot_on_movement.html