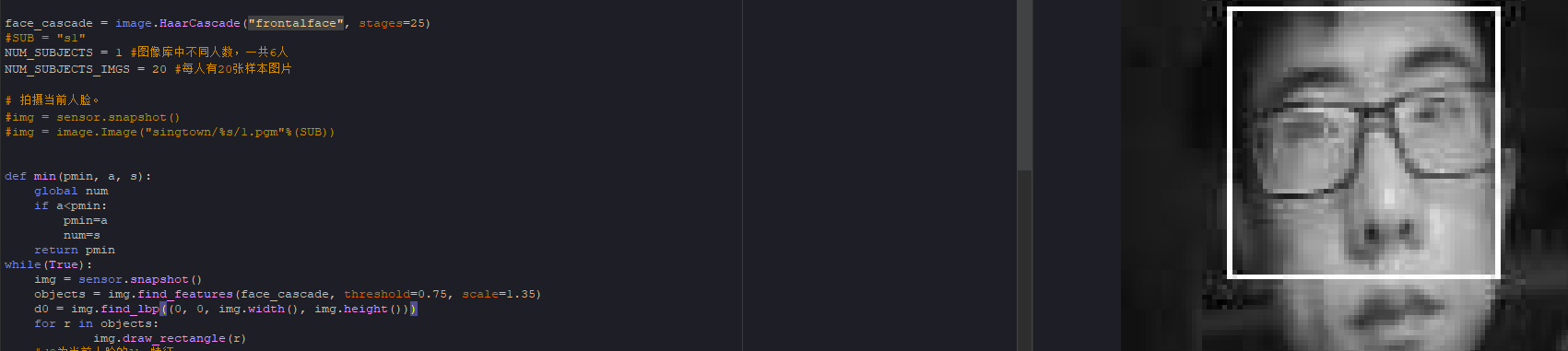
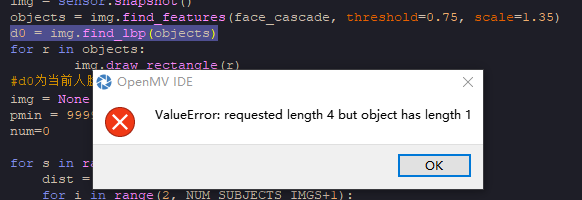
这里是全部代码,objects那里会报错
import sensor, time, image, pyb
from pyb import UART
uart = UART(3, 19200)
sensor.set_contrast(1)
sensor.set_gainceiling(16)
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others)
sensor.set_windowing((92,112))
sensor.skip_frames(10) # Let new settings take affect.
sensor.skip_frames(time = 5000) #等待5s
face_cascade = image.HaarCascade("frontalface", stages=25)
NUM_SUBJECTS = 1 #图像库中不同人数,一共6人
NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片
def min(pmin, a, s):
global num
if a<pmin:
pmin=a
num=s
return pmin
while(True):
img = sensor.snapshot()
objects = img.find_features(face_cascade, threshold=0.75, scale=1.35)
d0 = img.find_lbp((objects))
for r in objects:
img.draw_rectangle(r)
#d0为当前人脸的lbp特征
img = None
pmin = 999999
num=0
for s in range(1, NUM_SUBJECTS+1):
dist = 0
for i in range(2, NUM_SUBJECTS_IMGS+1):
img = image.Image("zhongbei1/s%d/%d.pgm"%(s, i))
d1 = img.find_lbp((0, 0, img.width(), img.height()))
#d1为第s文件夹中的第i张图片的lbp特征
dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。
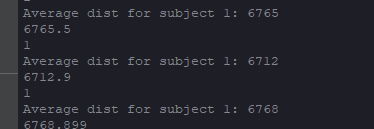
print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS))
pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。
print(pmin)
if pmin<9000:
a=1
if pmin>9000:
a=0
output="%d\n"%(a)
uart.write(output)
#print(num) # num为当前最匹配的人的编号。
print(a)