请问您解决该问题了吗
byce
@byce
0
声望
7
楼层
1036
资料浏览
0
粉丝
0
关注
byce 发布的帖子
-
RE: 图像二值化函数为什么转换图像后还是以灰度的形式?发布在 OpenMV Cam
THRESHOLD = (0, 150) BINARY_VISIBLE = True import sensor, image, time, math, pyb from machine import Pin sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QQQVGA) #80x60 sensor.skip_frames(time = 2000) sensor.set_vflip(True) sensor.set_hmirror(True) #翻转 clock = time.clock() while(True): clock.tick() img = sensor.snapshot() img.binary([THRESHOLD],invert=1)用这段代码之后还是会出现图上那种情况。想请问如何才能避免传输损失,我想让整个图像只有黑白两色(因为现在图上一些像素点相当于灰度图一样,对我算法有一定的干扰)
还有IDE没有提供01二值化图像的显示功能,所以我猜灰度图经过二值化后还是只能用0和255来判断每个像素点。 -
RE: 图像二值化函数为什么转换图像后还是以灰度的形式?发布在 OpenMV Cam
@yuan
 和循线小车的例程代码差不多,在二值化后IDE上面显示的还是有灰度值的,而且是以0-255的形式使用像素点
和循线小车的例程代码差不多,在二值化后IDE上面显示的还是有灰度值的,而且是以0-255的形式使用像素点 -
RE: 图像二值化函数为什么转换图像后还是以灰度的形式?发布在 OpenMV Cam
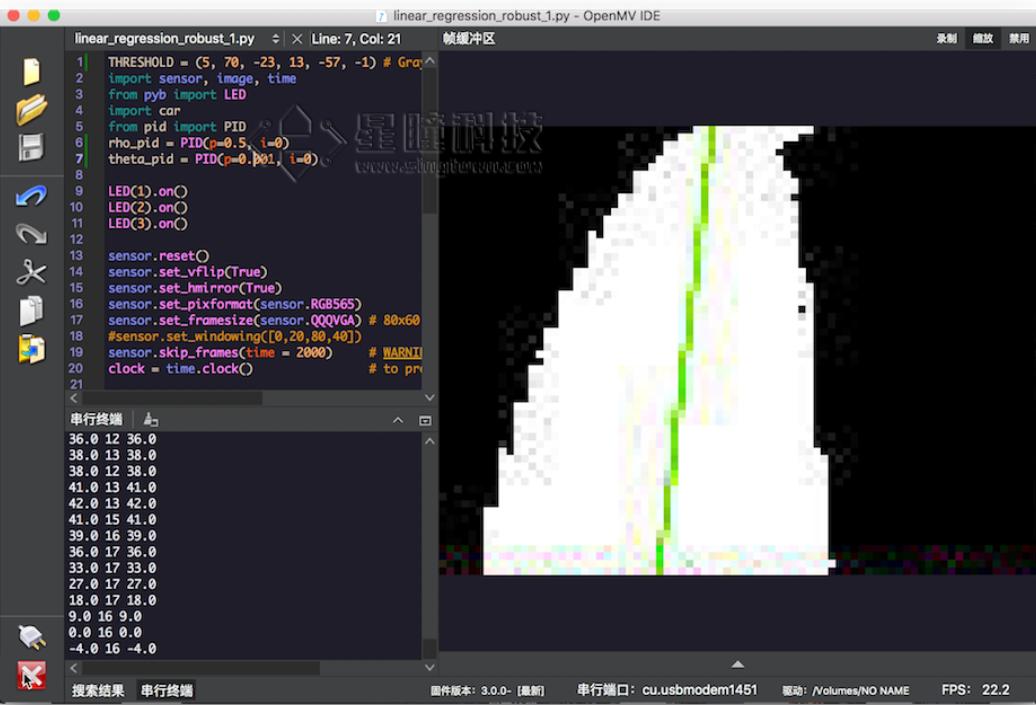
如上手教程中寻线小车的那一节的例程所示,
sensor.snapshot().binary([THRESHOLD]之后得到的图像并不是只有0,1的像素,从IDE右边的帧缓冲区也可以看出来,有些点还是带灰度的
-
图像二值化函数为什么转换图像后还是以灰度的形式?发布在 OpenMV Cam
img.binary()函数为什么转换图像后还是以灰度的形式,而不是只有0和1的形式。如果我要做成只有0和1的二值形式应该怎么做?