运行报错 。硬件设备openmv3 cam7.固件4.02
-
# Find Line Segments Example # # This example shows off how to find line segments in the image. For each line object # found in the image a line object is returned which includes the line's rotation. # find_line_segments() finds finite length lines (but is slow). # Use find_line_segments() to find non-infinite lines (and is fast). enable_lens_corr = False # turn on for straighter lines... import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() # All lines also have `x1()`, `y1()`, `x2()`, and `y2()` methods to get their end-points # and a `line()` method to get all the above as one 4 value tuple for `draw_line()`. while(True): clock.tick() img = sensor.snapshot() if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens... # `merge_distance` controls the merging of nearby lines. At 0 (the default), no # merging is done. At 1, any line 1 pixel away from another is merged... and so # on as you increase this value. You may wish to merge lines as line segment # detection produces a lot of line segment results. # `max_theta_diff` controls the maximum amount of rotation difference between # any two lines about to be merged. The default setting allows for 15 degrees. for l in img.find_line_segments(merge_distance = 0, max_theta_diff = 5): img.draw_line(l.line(), color = (255, 0, 0)) # print(l) print("FPS %f" % clock.fps()) 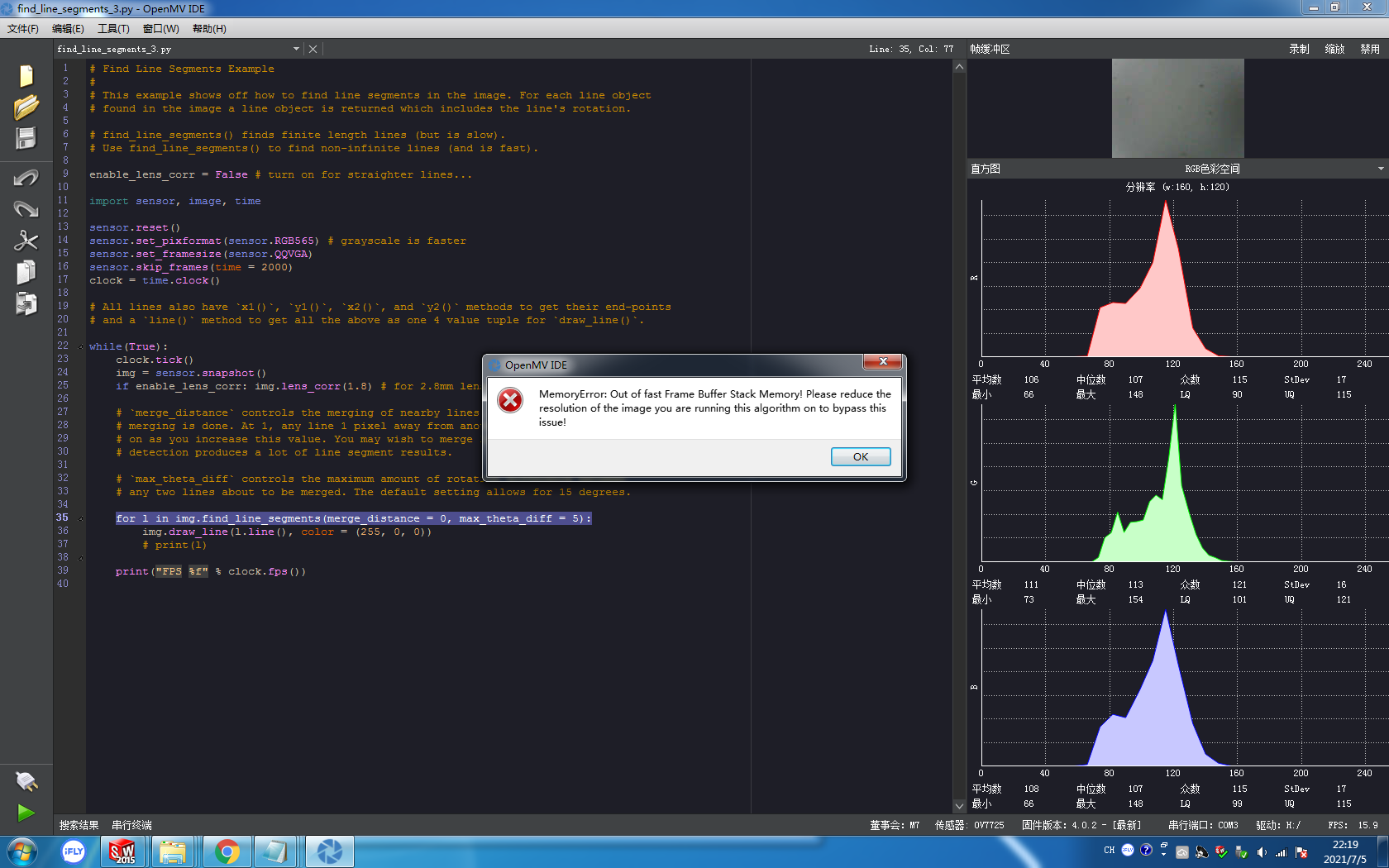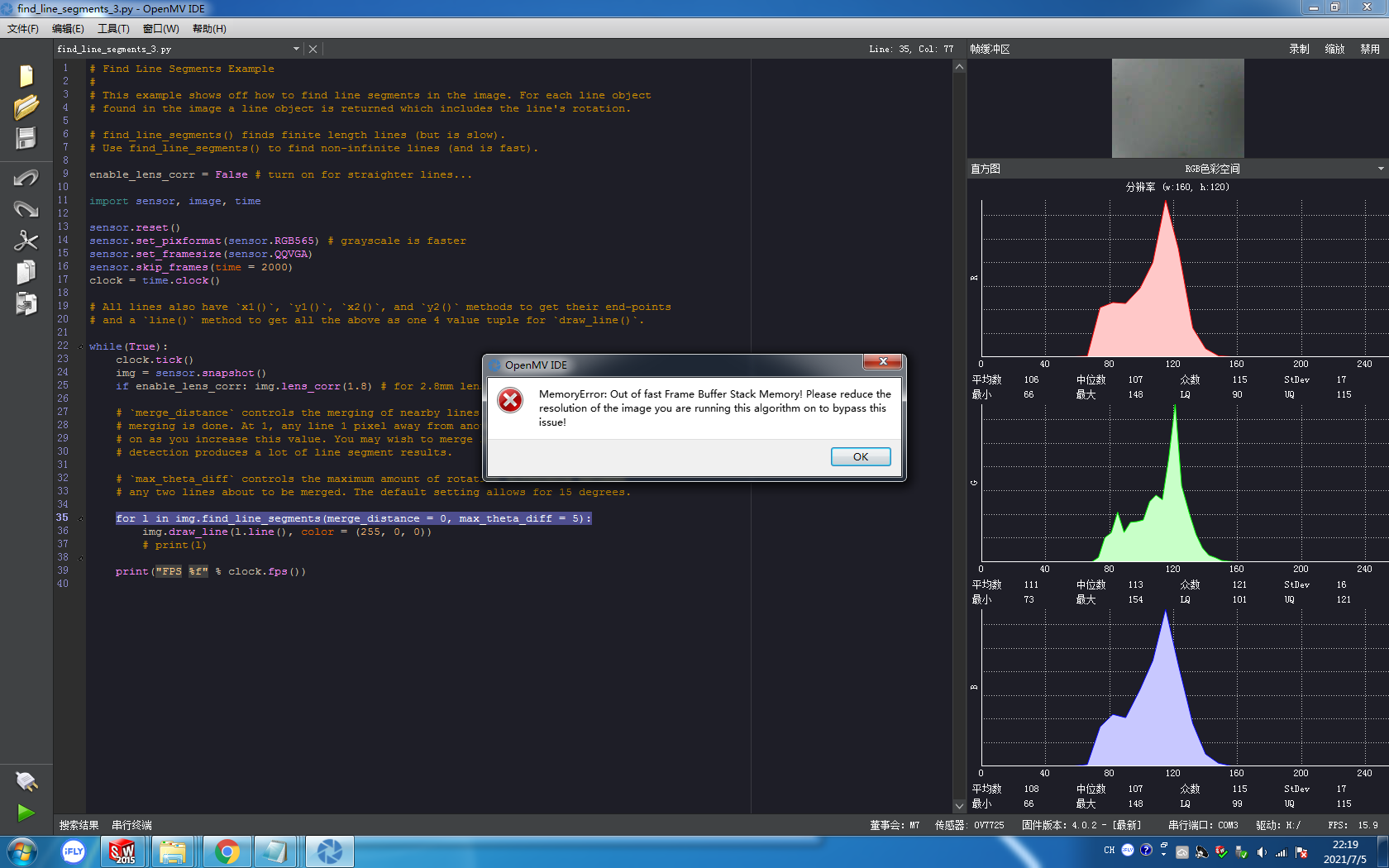
-
这个算法占用内存比较大,OpenMV3上只能用QQQVGA