小车找网球的路径规划问题
-
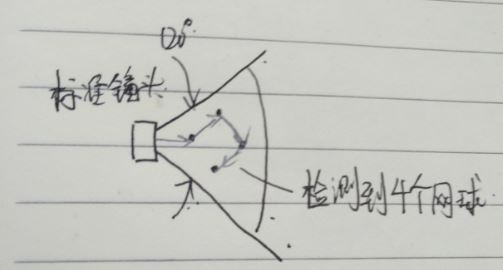
如图,是小车前端的摄像头。我们买的标准镜头。我们有以下两个想法,不知道有没有可能实现。
1.如果它视野范围内有四个球,我们想让它记下四个位置,在用arduino驱动小车按由远及近,由左及右的路径走过去;它把第一次记下的四个球捡干净之后,向左转120度,再检测另一个方向。能实现吗?具体该怎么实现小球一次记所有位置以及从左到右,从前到后的路径规划?
2.它视野范围内有四个球,它只记住第一个球的位置,过去之后按它现在方向“看”另一块范围,而忽略了它身边的球。但是总有在一个方向上没有球了,它需要转身的时候,那样就能检测到之前错过的球了,就是效率低了点。这种方法能实现吗?怎样实现选择离它最近的一个球,怎样转向?
3.如果在小球“视线”之外的球,要怎样规划,才能找到。
-
请从画面来考虑,而不是真实3维场景。OpenMV 是单目摄像头,获取不到深度信息。
比如,找到最近的小球,应该就是找到画面中最大的色块。
至于记下所有的位置,我觉得不可行。